近日,基于海马尾巴通过共形抓取珊瑚等海洋生物以稳定自身姿态的行为机制,中山大学吴嘉宁副教授联合大连理工大学彭海军教授、英国伦敦南岸大学Hamed Rajabi提出了一种仿生智能连续型机器人,利用机器人的物理智能再现了海马尾巴所具有的适应性共形抓取能力。
该项研究成果以《Versatile like a seahorse tail: a bio-inspired programmable continuum robot for conformal grasping》为题,在国际知名期刊《Advanced Intelligent Systems》发表。

▍为什么以海马为仿生对象?
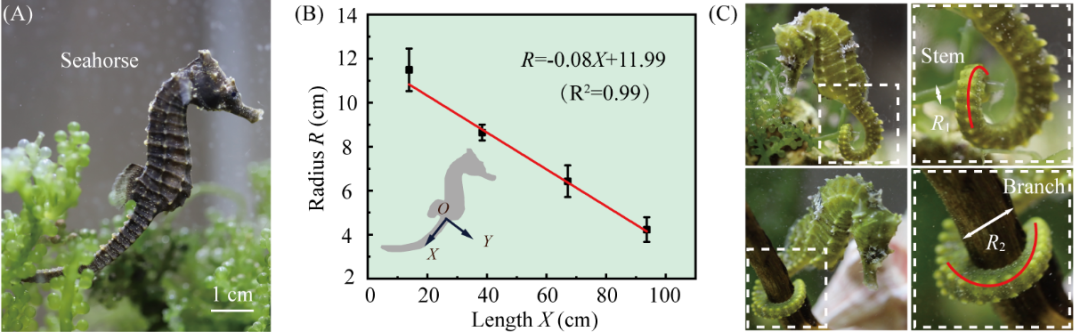
海马(Hippocampus)是刺鱼目海龙科暖海生数种小型鱼类的统称,因其独特的外形而闻名。这种生物在海洋中的游动速度极慢,且易于受到海水流动的影响而飘忽不定,这些不利因素都可能为其捕食造成极大的挑战。
实际上,海马拥有诸多独家技巧能够有效地捕捉到行动迅速、善于躲藏的桡足类生物,以维持生存能量所需。
这里,研究人员主要关注的技巧是:海马能够利用其锥形尾巴牢牢地缠绕在各种具有不同直径/曲率的海洋生物表面,如:海草、珊瑚等,提高了在海水中的姿态稳定性,为“守株待兔”式的捕食策略提供了必要前提。
▍如何设计和分析仿生智能连续型机器人?
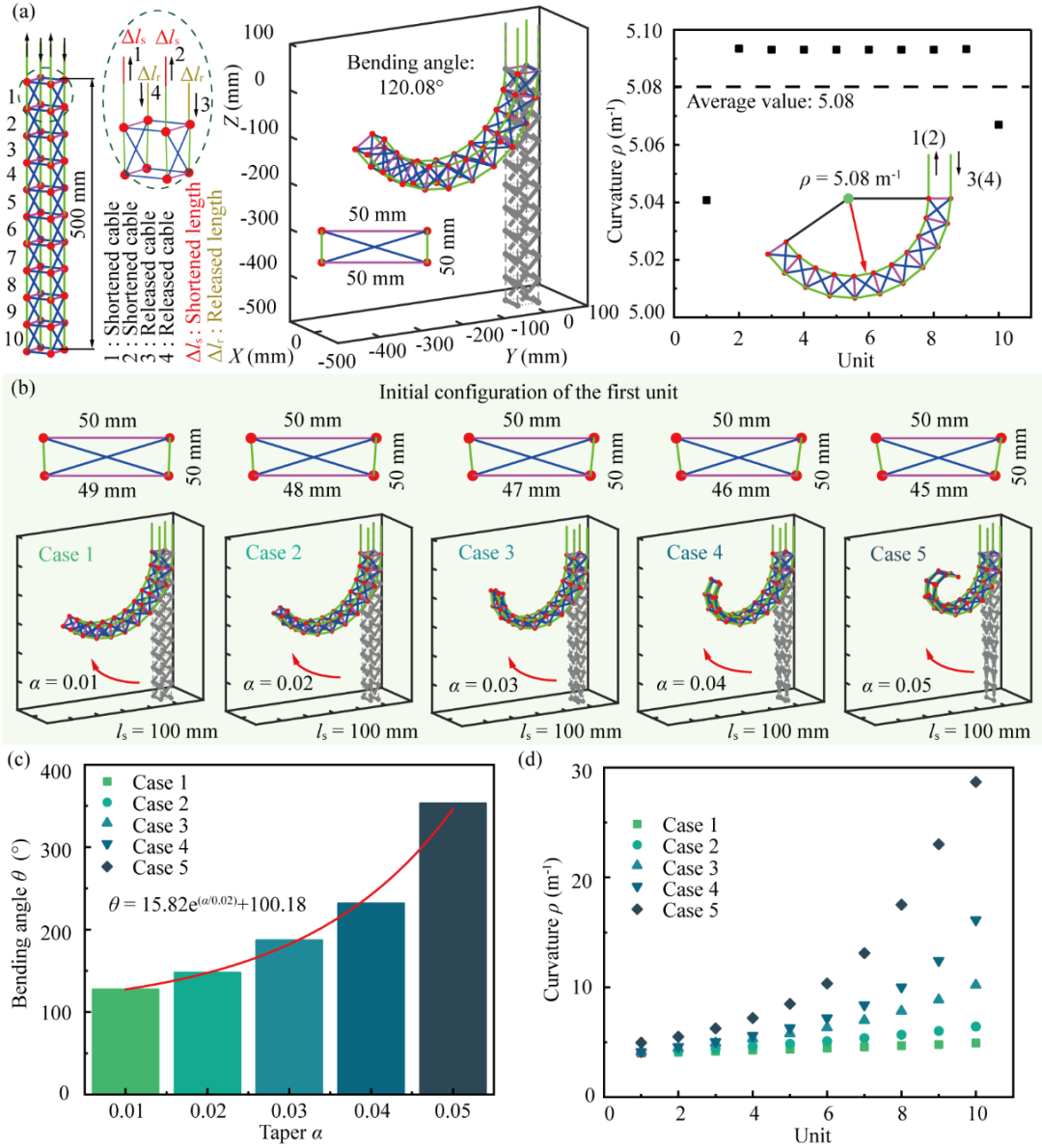
基于海马利用其锥形尾巴以共形缠绕各类不同曲率海洋生物,进而提高姿态稳定性的生物行为,本研究提出了一种通过张拉整体结构构建的仿生智能连续型机器人。
为了探究该连续型机器人锥度对弯曲变形的影响,本研究基于多体系统动力学的理论框架,构建了连续型机器人的力学模型,并设置了5种不同锥度(0.01,0.02,…,0.05)的理论构型。
通过量化上述5种构型中机器人的弯曲角度及各模块的弯曲曲率,得到的理论分析结果表明:1)机器人的弯曲角度随锥度的增加成指数型提高;2)当构型锥度由0.01增加至0.05时,机器人模块的曲率范围从5.08~5.25 m-1增加到5.08~28.15 m-1。
利用在锥度为0.05的机器人构型中模块间的曲率差异性,有利于提高机器人对不同曲率物体的共形抓取性能,进而解决了经典等截面连续型机器人在弯曲抓取时因其等曲率变形而引起的共形抓取局限性。
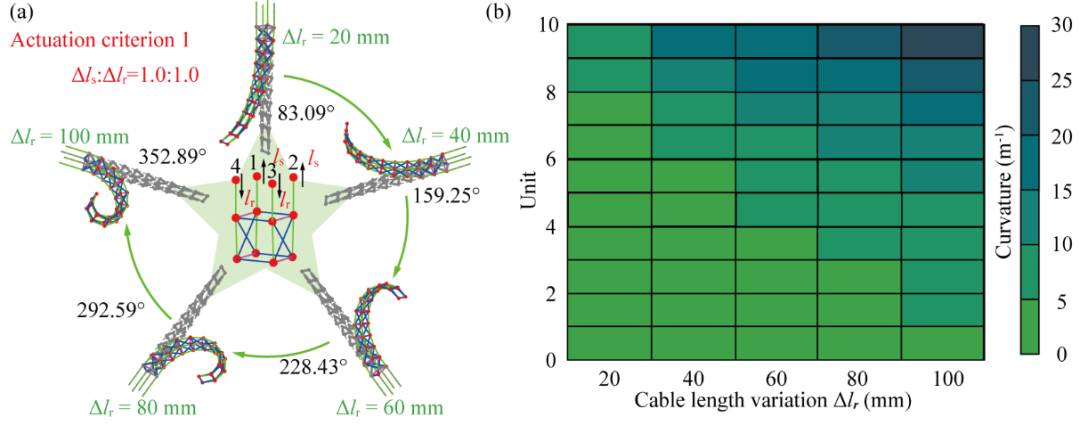
基于上述理论框架,本研究构建了一种以曲率为输入的绳索驱动控制模板,以供针对不同曲率需求而定制选择。此模板的构建有利于降低该连续型机器人的控制复杂性,进而提高了机器人针对不同曲率物体的响应速度。
▍仿生智能连续型机器人能做什么?
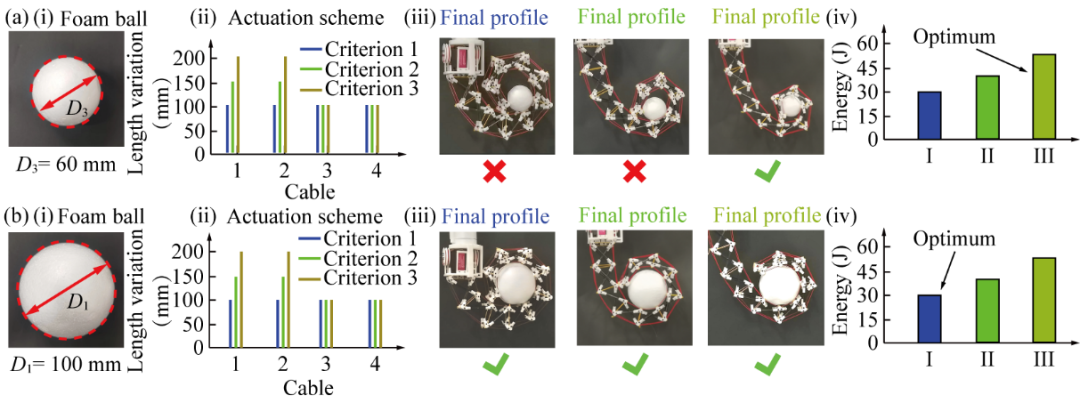
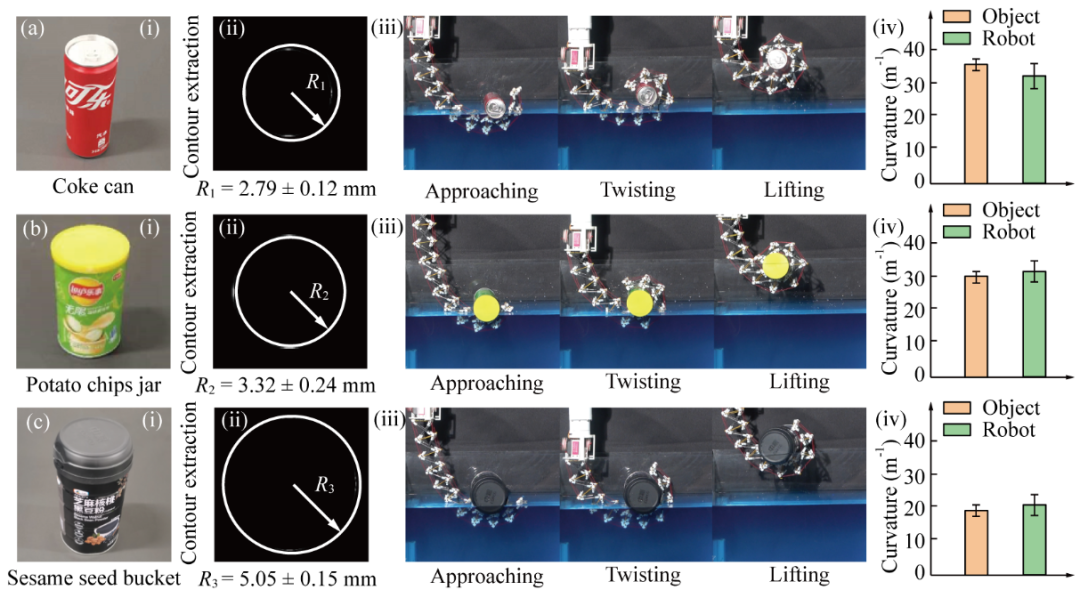
为了验证上述理论研究,本研究通过3D打印增材制造技术加工了一款智能仿生连续型机器人。以三种不同规格泡沫球的曲率为输入,在绳索驱动控制数据库中筛选适当的控制策略,并将其通过微型控制器来驱动电机完成缠绕捕获工作。
通过对各模块的曲率评估发现:该连续型机器人对上述三种不同曲率的泡沫球均能实现共形抓取,以此说明本研究所提出的机器人构型及控制模板实现了预期功能。

然而,针对某些特定的曲率需求,可能存在不止一种的理想控制策略。针对此问题,本研究指出:控制策略的选择需要通过权衡共形抓取效果和驱动能量消耗,进而唯一确定最优控制策略,以避免机器人在多种策略间抉择而引起的误动作等不利现象。
▍仿生智能连续型机器人能应用在哪里?
守护海洋生态之美:本研究格外关注该连续型机器人在海洋生态环境保护方面所具有的潜在应用价值。
因此,构建了一系列利用该机器人清理水面漂浮物体的应用场景。实验结果表明:该机器人能够共形地抓取各类具有不同曲率的常见水面漂浮生活垃圾。
此外,该研究可能在未来激发用于收集漂浮污染物的各种原位操作、表征技术的发展。
以上文章转载于微信公众号 机器人大讲堂,如有侵权,请及时联系我们修改或进行删除。
