昆虫机器人可以进行高效的自由移动,具有可操控性高、支持无线通讯等特点,在军事侦察、环境监测、遥感技术以及生物医学工程等前沿领域受到研究人员的广泛关注。受自然界昆虫的启发,基于各种设计原理和驱动策略的仿生机器人被成功制备,包括:形貌类似昆虫的机器人、具有先进运动系统的机器人、体积小巧的新概念软体机器人等。例如,隐翅虫(rove beetle)可以通过在尾部释放化学物质,由此形成的表面张力梯度可以产生快速逃离的推动力,在水面上推进隐翅虫。与传统的机械驱动策略不同,在空气-水界面的Marangoni效应驱动不需要特殊的功能材料或微纳米结构,这种驱动方式可以使得机器人能量的直接转化和自由无栓运动。因此,在开发昆虫尺度的Marangoni效应驱动的机器人方面具有巨大的潜力。
Marangoni效应驱动的本质是构建表面张力梯度,表面张力大的液体对相对于表面张力小的液体对周围液体的拉力更大。因此,液体表面的漂浮物会朝着表面张力大的方向移动。基于这一原理,已经成功地制备出基于物理Marangoni效应和化学Marangoni效应驱动的机器人。对于物理Marangoni效应驱动机器人,可以通过热或者光提高局部的温度,改变局部的表面张力,实现机器人的推动。对于化学Marangoni效应驱动的机器人,其推动过程是一个动态的过程。化学燃料(如:酒精、樟脑酸等)加载在机器人身体上,逐渐释放产生表面张力梯度,驱动机器人产生类似隐翅虫快速移动。相对于光热Marangoni效应,化学Marangoni效应无需光热转换这一过程。因此,化学Marangoni效应驱动响应更快,并且可以产生更大的驱动力,对于Marangoni效应驱动的机器人具有很大的潜力。然而,化学Marangoni效应流体驱动具有复杂的流体模式,其推动的方向是随意而不确定的,这使得化学Marangoni效应驱动过程在液体表面产生不稳定和不可控的二维湍流。目前,基于化学Marangoni效应驱动技术控制机器人存在巨大的挑战,严重限制他们在机器人技术领域的应用。
最近,吉林大学张永来教授团队采用激光直写技术和软模板转写技术相结合的方法制备了嵌入微流控通道(T型结和特斯拉阀)和光热腔(基于石墨烯&PDMS的光热复合物空气室)的可控Marangoni效应驱动的仿生游泳机器人(图1)。在可控燃料释放开关的光热空气室的帮助下,实现了游泳机器人的按需推进。以Marangoni效应驱动的游泳机器人为运动平台,作者进一步在机器人身上集成了微型无线摄像机,并将其放置在自然环境中,演示了在自然环境下的灵活操作和对环境的监控过程(图2)。机器人在自然环境中携带摄像头成功越过障碍,游泳机器人上的无线摄像头可以捕捉环境图像,并将视频信息发送到研究人员的手机等移动设备上面。移动设备无需联网可直接与无线摄像头链接,增加了信息传输过程中的安全性。从传输回来的图像信息中很容易观察到环境中的蓝天、白云、鸟等信息。本研究为通过化学Marangoni效应驱动技术开发游泳机器人提供了一种新的方案。
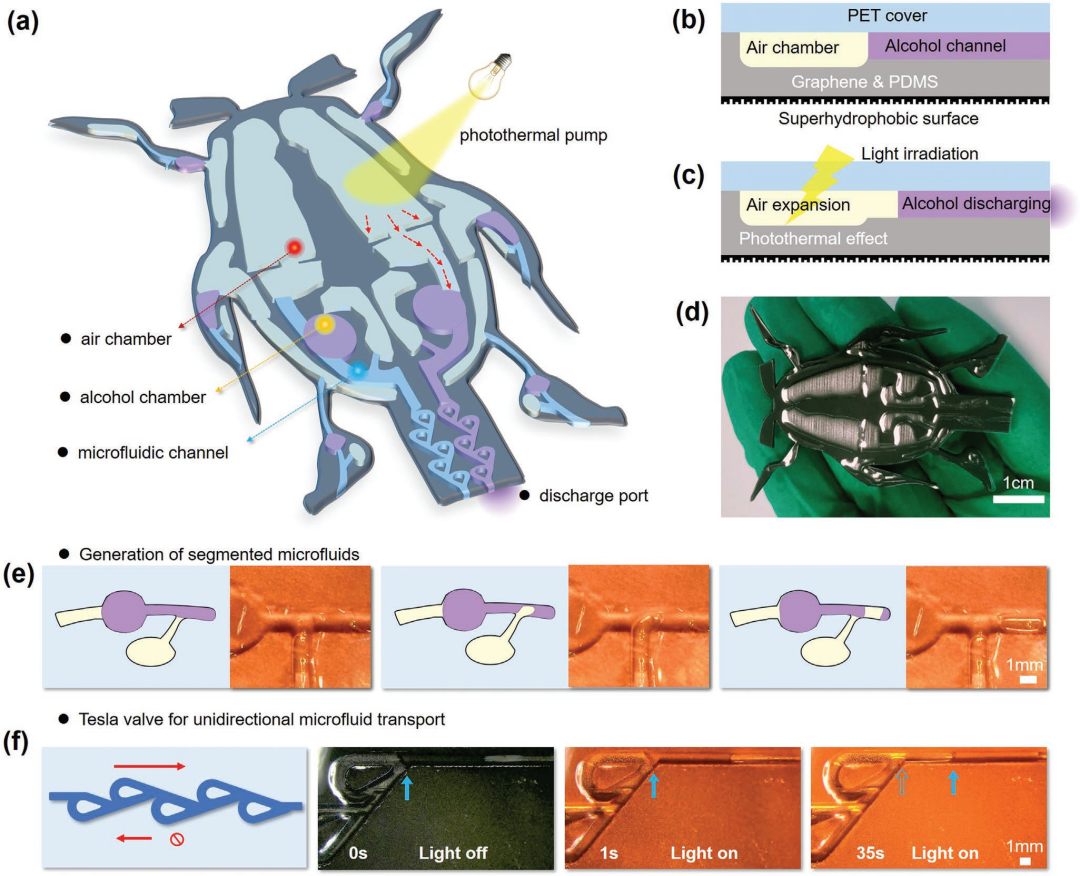
图1受隐翅虫启发的游泳机器人示意图。
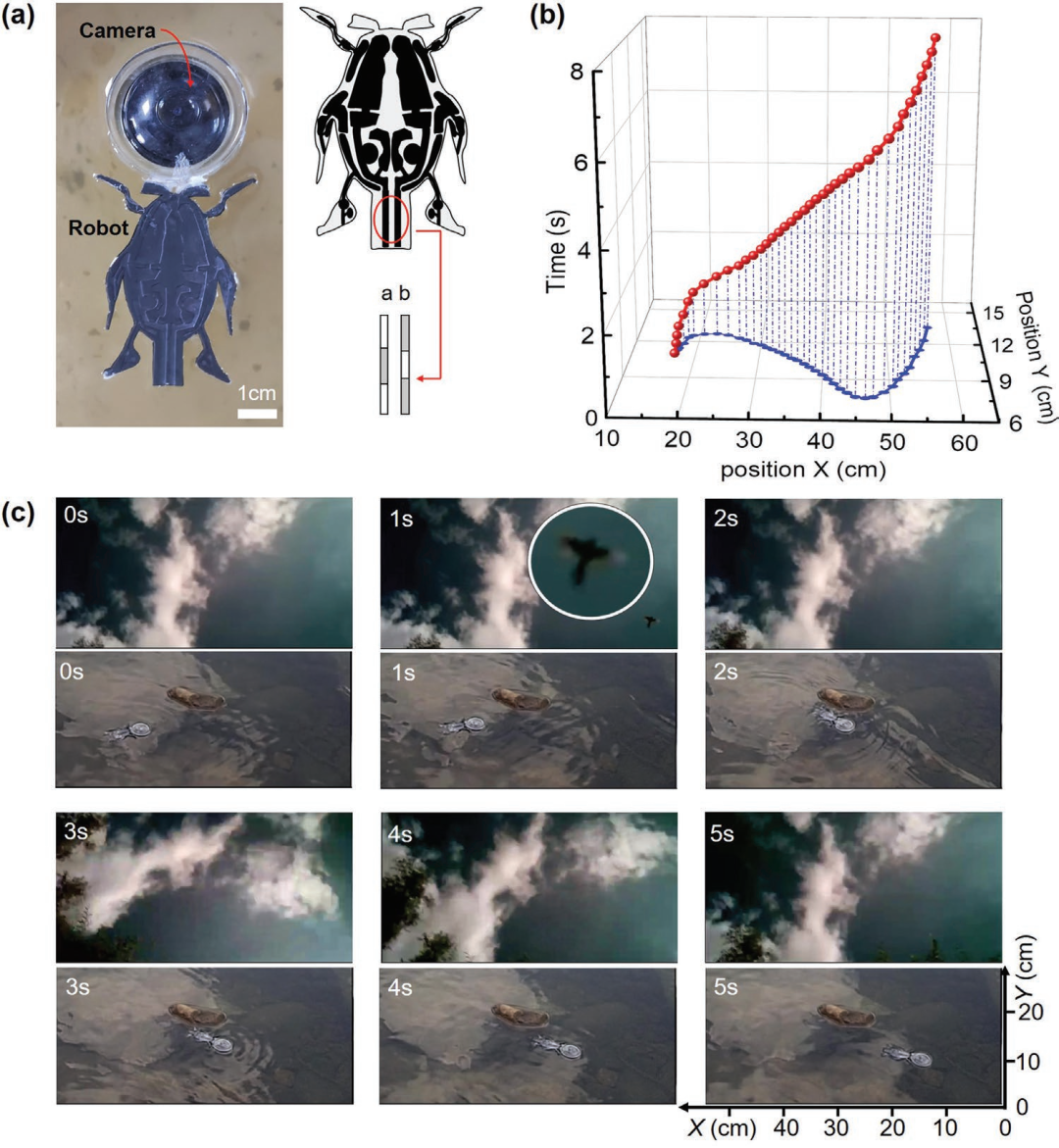
图2 游泳机器人集成小型相机在自然环境中移动与拍照。
该论文以“Bioinspired Superhydrophobic Swimming Robots with Embedded Microfluidic Networks and Photothermal Switch for Controllable Marangoni Propulsion”为题发表在Advanced Functional Materials期刊上(Adv. Funct. Mater. 2022, DOI: 10.1002/adfm.202208677)。文章通讯作者为吉林大学张永来教授和韩冬冬副教授,第一作者是毛江维博士。
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。
