史上攀爬能力最强的机器人长啥样?
当当当,答案揭晓——

别看它小小一个,但人家已经征服了几乎所有不同地貌的表面!
它属于微型软体机器人家族,除了最基础的墙面、坡面、天花板,它还可以在圆柱面内外侧、波浪面、楔形面、球面等表面如履平地!
在球面上爬:
不同曲率的波浪面:
还能爬树叶:
除此之外,它还能“翻个跟头”,在两个不同表面之间过渡:
或者在爬行过程中转弯:
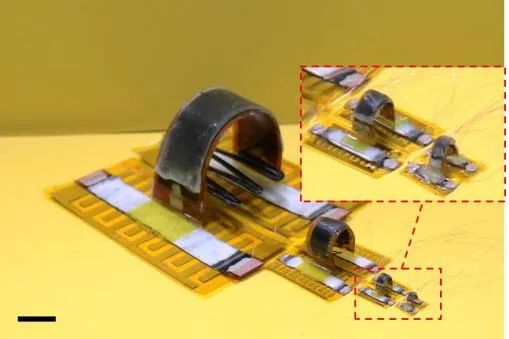
更强的是,它的身体可以轻松的变化不同长度,也可以负重携带摄像机,体长从6毫米到90毫米、质量从0.2克到3克不等。
这个机器人界的“攀爬冠军”出自清华大学航天航空学院张一慧教授课题组,相关研究成果于近日在《PNAS》(美国科学院院)以《一种基于可变形三维驱动器的可在复杂表面攀爬和过渡的微型软体机器人》为题发表。
▍电驱动智能材料,主动适应不同表面
所以这个相貌平平的软体机器人,是如何练就一身攀爬本领的呢?
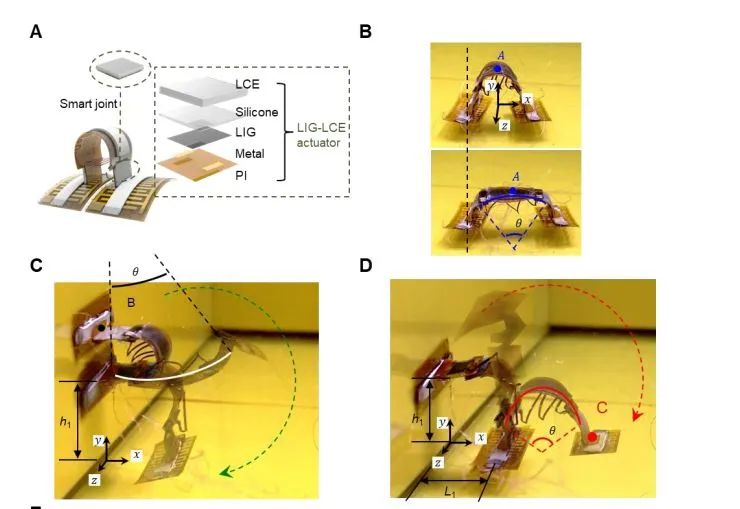
秘诀在于它可变形的身体和脚垫,以及连接二者的智能关节。
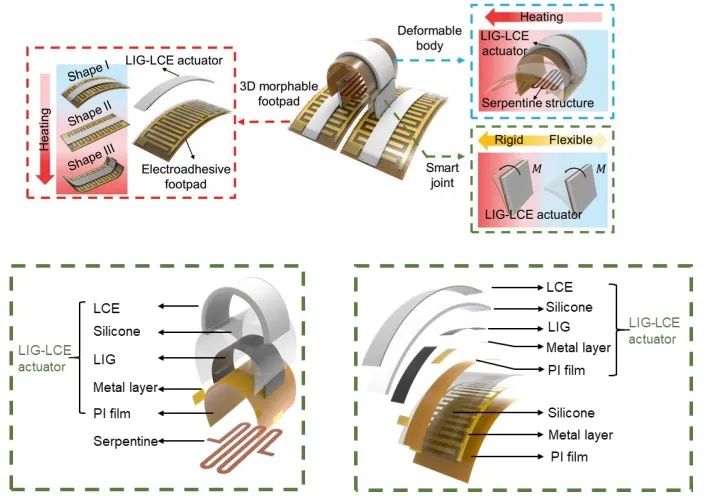
它们均由液晶弹性体(LCEs)材料为基础制成。这是一种智能材料,在外界刺激下,例如热、光、电、磁、pH、湿度等,材料会发生宏观形变,撤去外界刺激后,又会恢复原状。
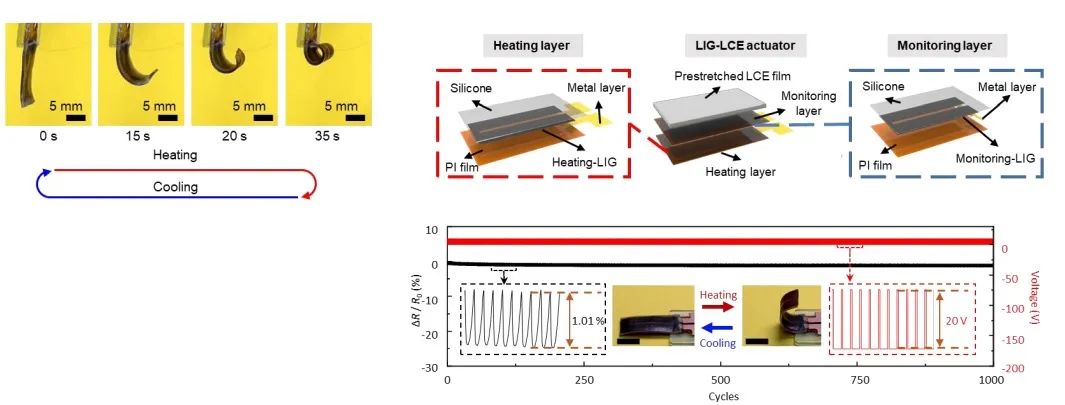
结合多层三维激光诱导石墨烯(LIG)来产生电加热,驱动器可以实现毫米尺度(从1毫米到10毫米)的3D形状变形(弯曲角度>200°),这是以前的软体机器人无法实现的。
机器人的脚垫还拥有一个额外的电胶层,提供攀爬运动所需的粘接力,同时可以主动变形来更好的适应不同形状的表面。
机器人的“脚腕”是连接身体和脚垫的「智能关节」,通过对可变刚度「智能关节」的控制,机器人能够在步进、“翻筋斗”前进和翻转过渡三种运动步态之间按需切换。
屈曲引导的3D组装让机器人的制造变得更灵活!能够制造不同尺寸(从6到90毫米)和质量(从0.2到3克)的机器人。
除了尺寸重量外,使用LIG-LCE原理制作的机器人还可以有更多的攀爬方式:
▍未来可代替人类进入复杂环境作业
研发人员其实是受到浮游生物水螅的启发,开发了这样一个软体机器人。
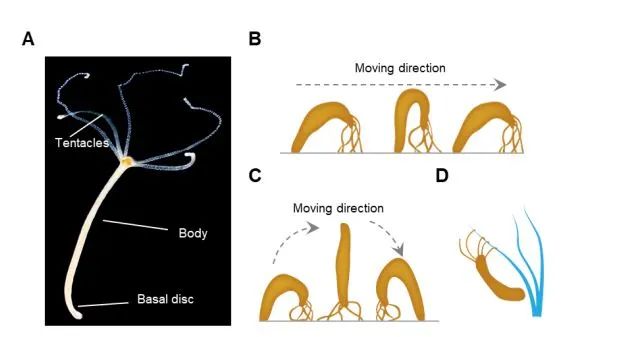
“解锁”了这一新
技能后,软体机器人可进入一些狭窄、复杂的环境中,代替人类执行探测等作业任务。例如在飞机发动机、炼油机等复杂系统中,该机器人可以经历各类管道、齿轮等曲面结构,到达指定位置进行故障检测等任务。
清华大学张一慧教授为该文章的通讯作者,清华大学航院博士后庞文博、2020级博士生徐世威为文章的共同第一作者。论文作者还包括北京航空航天大学文力教授,北京航空航天大学薛兆国副教授,清华大学航院2018级博士生邬军、2019级博士生金天棨、2018级博士生刘志、2017级博士生程旭,航院博士后柏韧恒、肖越、张帆、白柯、宋洪烈等。
该研究得到了国家自然科学基金委原创探索计划项目、基金委创新研究群体、科学探索奖、霍英东青年教师基金、清华大学国强研究院基金等项目的资助。
以上文章转载于微信公众号机器人大讲堂,如有侵权,请及时联系我们修改或进行删除。
