软体微机器人因其形态可变性、物理适应性、交互友好性而得到广泛关注,在癌症靶向治疗等个性化先端医疗领域展现出巨大潜力。目前,微机器人通过搭载特定物质并在光、电、磁等物理场刺激下运动、形变可以完成特定任务。光和磁场都可以作为非接触的远程控制形式,用于控制某些运动行为,在微机器人和生物医疗领域具有广阔的应用前景。
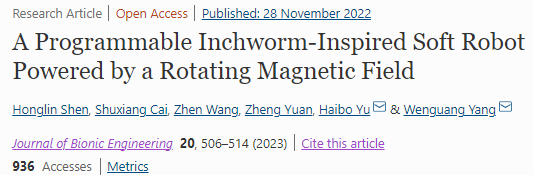
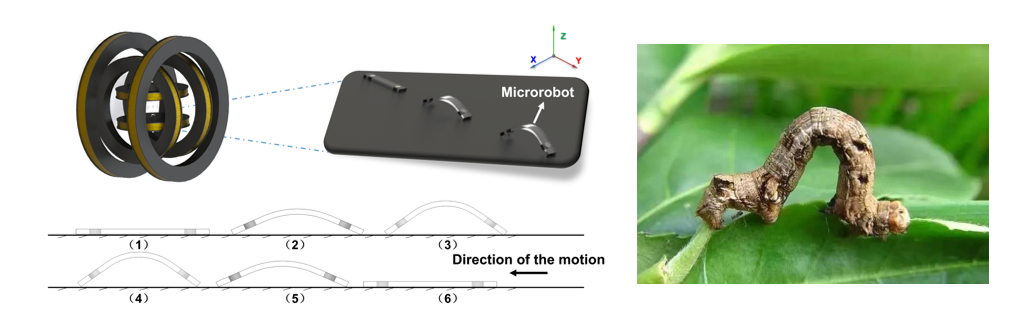
图1 磁驱动仿生尺蠖机器人运动示意图
近日,烟台大学杨文广教授课题组在《Journal of Bionic Engineering》发表题为《A Programmable Inchworm Inspired Soft Robot Powered by a Rotating Magnetic Field》的学术论文。尺蠖属于无脊椎动物,由于身体中间部分缺失足,故以屈伸的特征性步态移动,其运动的独特性引起了科学家们极大的兴趣,该工作受仿生思想的启发,将尺蠖的运动形式应用在微型机器人中,制造了一种磁场驱动的可控运动的尺蠖机器人。在聚二甲基硅氧烷(PDMS)内部封装磁性材料,磁场发生器为机器人提供驱动动力。通过计算机编程来改变磁场的强度和方向,从而实现机器人的弯曲、扭转等大幅变形。
图2 磁场控制下仿生尺蠖机器人的多种运动模式
磁驱动微型机器人具有独特的以微创方式在小规模范围内移动和执行任务的能力,因此在生物医学领域具有广阔的前景,该仿生尺蠖机器人为微型检测和探测器的设计提供了一种新颖的思路。
以上文章转载于微信公众号仿生工程学报,如有侵权,请及时联系我们修改或进行删除。
信息发布人: 杨文广教授课题组
发布单位: 烟台大学
信息源: https://rdcu.be/c6MQT
