近日,IEEE旗下的旗舰杂志IEEE Spectrum在其机器人专栏发布了文章Robotic Tongue Licks Gecko Gripper Clean>When everything sticks to your gripper, you need a good cleaning system,谈论了曾在机器人领域引起热议、却又很难被商业化使用的“壁虎材料”。
谈及壁虎材料与机器人的结合应用,文章介绍了通用智能机器人公司Flexiv非夕科技去年推出的力控型夹爪Grav Enhanced,该夹爪通过采用壁虎材料而具备了“超级摩擦力”;此外,非夕自研的壁虎材料清洁站也被认为是大幅提高夹爪实用性的有效手段。
▍壁虎材料与机器人
大约在十年前,作为一种受壁虎启发的定向吸附材料,壁虎材料(gecko-inspired adhesives)在机器人领域引起了热议。
壁虎之所以能在垂直的玻璃面上自由爬行,得益于范德华力,而壁虎材料正是基于这一原理,实现了吸附而不粘黏的效果,因此被广泛应用于各种攀爬机器人中(它们中的有些十分可爱)。
除了壁虎材料外,想要在光滑的物体表面实现吸附,吸盘几乎是唯一可选的末端工具。然而,吸盘需要配合各种外部设备才能运作,相比之下,壁虎材料更加轻巧便捷。
近年来,我们却鲜少看到壁虎材料的大规模应用。这其中的原因之一是,它能吸附光滑的物体表面,却也“只能”吸附光滑的物体表面——对于许多移动机器人来说,这就成为了限制;此外,对壁虎材料的研究和实际应用之间还存着在很大差距,这其中涉及到许多尚待解决的“痛点”。
非夕科技通过实现壁虎材料的自动清洁,使其在商业环境中得到真正的应用。
▍壁虎脚掌的秘密
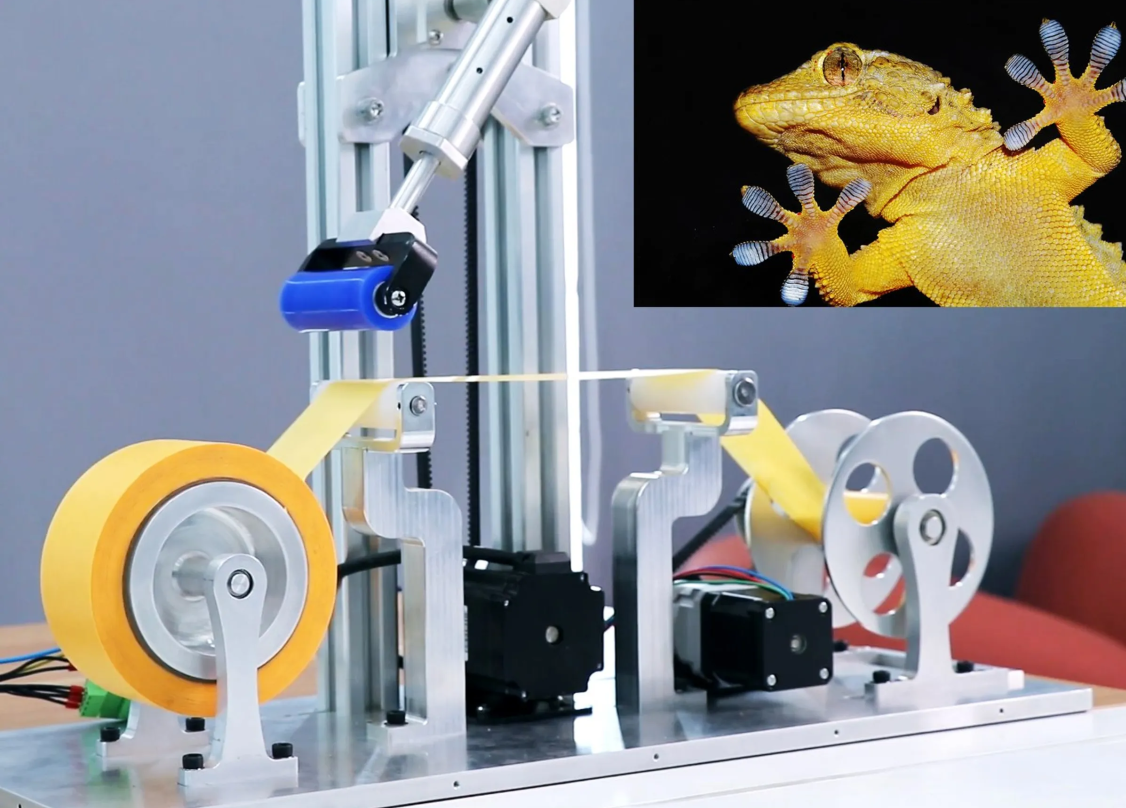
当我们将壁虎脚掌放大许多倍去观察,会发现其每个脚趾上都布满了数百万根如同毛发的纳米结构,它们被称为刚毛。每根刚毛的末端又进一步分叉,形成数百根更微小的铲状绒毛。这种刚毛和铲状绒毛的独特结构极大地增加了壁虎的脚掌面积,使其能够利用范德华力这种分子间微弱的相互作用力,将自己稳固地粘附在平滑表面上。
这项“技术”有着杰出的表现:壁虎仅凭一只脚就能稳稳地悬挂在竖直玻璃,而据推测,一只完全粘附的壁虎足以持握140公斤重量的物体(非实验数据)。
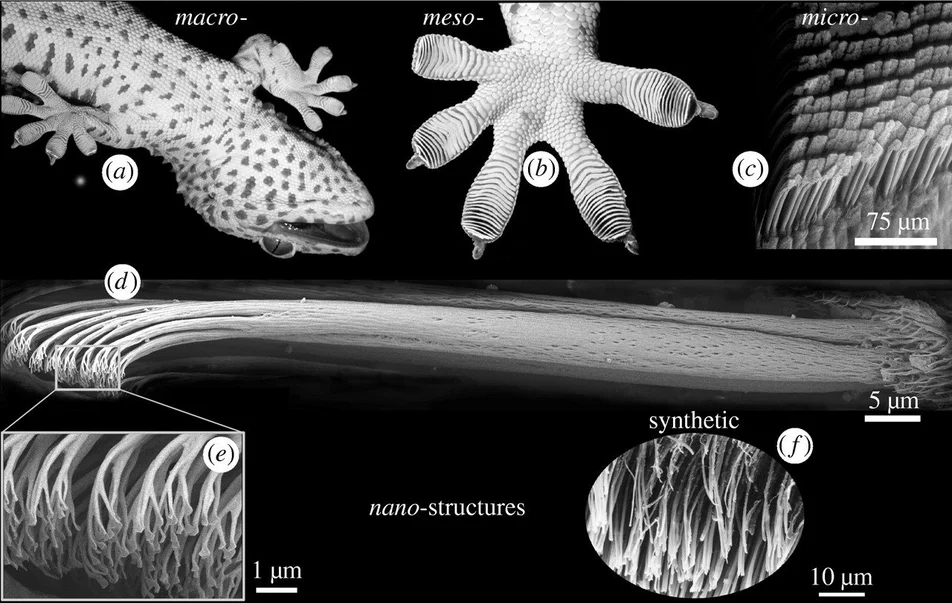
壁虎手掌黏着结构
壁虎脚掌的神奇之处还在于,那些铲状绒毛的粘附具有方向性(directional)。因此它的脚掌也可以轻松地从任何附着的物体表面上离开,而不会像使用胶水那样难以分离或留下痕迹。
因此,对这一现象更准确的描述应该是“干性吸附”,而不是我们通常所说的“粘性”。我们也可以想象壁虎的脚趾拥有非常强的“超级摩擦力”,若将这种“超级摩擦力”应用在机器人夹爪上,就会带来无限的可能性。
▍具备超级摩擦力的夹爪
这是非夕科技推出的夹爪星擎Grav Enhanced,它巧妙地结合了指尖刚性抓取和自带“超级摩擦力”的壁虎材料,不仅可以轻松提起重物,还能妥善抓取脆弱物品、避免不必要的挤压。
以抓取水球为例:传统夹爪在夹取时通常需要施加一定的挤压力,直到其与水球之间的摩擦力足以克服水球的重量——即摩擦力越大,所需的挤压力就越小。虽然水球可能是一个比较极端的例子,但提高夹具摩擦力对于处理易碎、易变形物体来说仍然有巨大帮助。
然而,这种干性吸附技术也面临一些挑战。比如构成材料的微小结构相对脆弱,容易受损;另外这种材料会粘附到几乎所有接触到的表面,也很容易积聚污垢。在科研环境中这些问题可能不太明显,但对于商业化应用来说,这种材料的脆弱性和易污染性无疑增加了实际应用的难度。
▍增强材料可用性的清洁站
非夕表示,其夹爪使用的壁虎材料能够进行高达200万次的抓取,且在此过程中抓取性能不会出现明显下降。这意味着,只要在其设计范围内合理使用,壁虎材料就能保持稳定的粘附性能。当然,如果提起的物体过重,可能会导致微结构撕裂,并在多次抓取后影响其效果。此外,为了防止壁虎材料被污垢堵塞,非夕设计了一个精巧的小型清洁站。这个清洁站的作用类似于壁虎的舌头,帮助清除粘附在材料上的污垢。
有趣的是,壁虎似乎并不使用舌头来进行清洁,是其脚趾具有自主清洁的功能。虽然理论上可以制作出同样能自我清洁的合成壁虎材料,但非夕表示,由于技术和实际应用的局限性,他们目前尚未在壁虎材料中复制这一自我清洁的过程。这可能又回到了技术在科研环境与商业环境中的差异这个主题。
据非夕表示,是客户对于使用夹具进行垃圾分拣回收的需求,促使他们意识到研发清洁系统的重要性,而解决方案的设计灵感来源于滚筒粘毛器。我必须说,这个清洁站简洁又高效。虽然未来有可能研发出更耐用、性价比更高、能够模拟壁虎脚趾进行自动清洁的材料,但在此之前,人造舌头(清洁站)可以做到这一点。
机器人Rizon+Grav Enhanced 垃圾回收应用
▍“壁虎夹爪”的多种应用
如IEEE Spectrim文章所述,非夕的力控夹爪Grav Enhanced利用壁虎材料的超级摩擦力,可以轻松拾起重物、也很容易释放,十分适合处理脆弱、易变形的物体;同时,它还具备两种模式——指尖的刚性抓取和使用壁虎材料的柔性抓取,并能够实现两种模式间的自由切换。此外,Grav系列夹爪具有超强物体适应性,在抓取、放下等常规操作能力之外,也拥有抵抗弯矩和做复杂操作任务的能力。
基于这些特性和能力,Grav Enhanced可以贴合接触面的不同材质和形状,完成复杂的工作内容,适用于精细装配、果蔬采摘、物品分拣等场景。
自适应机器人+壁虎夹爪 车灯组装应用
除Grav Enhanced外,采用壁虎材料的机器人末端夹具也可以具备多种形态,如非夕在前不久的美国ATX WEST展会上带来的“平面夹持装置”。采用机器人夹爪+平板+平板内壁虎材料的组合,这项demo可以温和、牢固、平稳地夹持手机并进行充电口插拔。
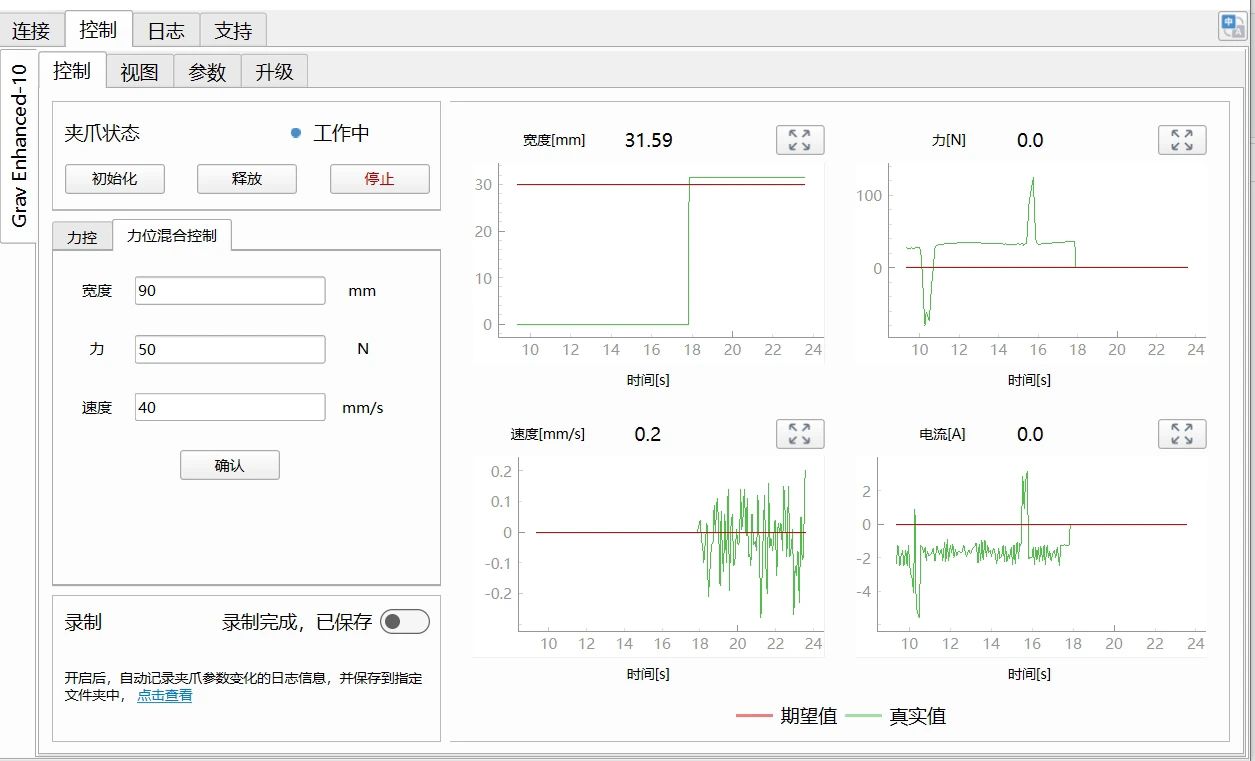
为了能够更好地控制夹爪运行,并对其状态进行实时监测,非夕还开发了一个简洁易懂的用户界面(Grav GUI)。通过调整数值、观测曲线、查看日志,使用者完全可以实现Grav Enhanced在多种应用场景中的高效作业。
非夕的Grav系列夹爪目前正在慕尼黑电子展进行展出(展位号:E1馆 1520),下周也会现身深圳ITES工业展(展位号:12号馆 H20),到场观众可以亲自体验到该系列夹爪的力控性能,以及壁虎材料的奇特吸附、释放能力。
