研究背景
在自然界中,灵活攀爬是动物的一项重要本领,它使得诸如壁虎或者树蛙等动物在捕食、逃避天敌和求偶中获得优势。对自然界动物的攀爬能力进行模仿学习,将进一步扩展机器人的行动范围,帮助机器人完成在危险场景中获取信号和在隐蔽环境中的侦察信息等任务。虽然科研人员已经开发出多种黏附系统和驱动单元来实现机器人的攀爬功能,但目前已有的攀爬机器人仍然在攀爬角度、攀爬速度、攀爬表面粗糙度以及攀爬过程中的灵活性方面远远落后于自然界中的动物系统。与此同时,随着科研人员对机器人领域探索的逐渐深入,软体系统在运动灵活度上和黏附鲁棒性上的优势逐渐凸显,将软体黏附系统与软体驱动系统结合将有望解决现阶段攀爬运动的局限。然而,受限于现有软体驱动系统的低输出与非线性,如何设计制造与软体机器人相匹配的黏附系统并提高机器人对于攀爬地形的适应能力,仍是阻碍软体攀爬机器人实际应用的关键因素。

创新点
清华大学张旻副教授、王晓浩教授团队,通过将一种带有倾斜微三棱柱结构的仿生足垫与柔性压电驱动薄膜匹配,发展了一种多功能且自适应的攀爬软体机器人系统,并为其命名为压电攀爬者。压电攀爬者系统具有快速(超过1.4身位每秒)、粗糙度适应能力广(可在纳米级光滑表面或者毫米级突起表面垂直攀爬)以及自主跨越攀爬等能力。受益于非对称微结构以及特有的升起-降落机制,仿生足垫最高可具有超400:1的摩擦力方向性,使其可以被输出微弱的压电薄膜驱动并辅助攀爬。仿生足垫的独特性质使其可以被直接应用在一系列软体机器上以制作攀爬机器人,如液晶弹性体和介电弹性体等。除此之外,因为后退运动被严格阻碍以及机器人的全身柔性,压电攀爬者还可以在无外界控制策略的条件下进行0°-60°-0°的自适应攀爬以及复杂地形中的自主导航逃脱。
文章解析
压电攀爬者的设计策略与代表性功能展示
首先,作者发展了掩模版贴附法与模板转移法以制作具有阵列孔洞结构的光刻胶模板,随后通过软光刻方法得到了具有倾斜微三棱柱结构的仿生黏附足垫。随后,两面带有银镀层的聚偏二氟乙烯压电薄膜与PET塑料薄膜通过剪纸机被切割成设计形状并黏合在一起组成具有一定弧度的软体驱动器。最终,作者按照剪切痕迹弯折出压电攀爬者的前腿与后腿并按照设计方向贴附两块仿生黏附足垫,制作出完整的压电攀爬者结构(图1a)。仿生黏附足垫上具有微米级的倾斜三棱柱结构(图1b),使得压电攀爬者前向运动时只受到很小的摩擦阻力,却在后退时受到极大的摩擦阻力。当压电薄膜受到周期性的电刺激信号之后,压电攀爬者将进行收缩-舒张的周期性摆动(图1c),仿生足垫在每个摆动周期内对前腿和后腿的后退滑动依次进行限制,从而帮助压电攀爬者进行一系列攀爬运动(图1d)。
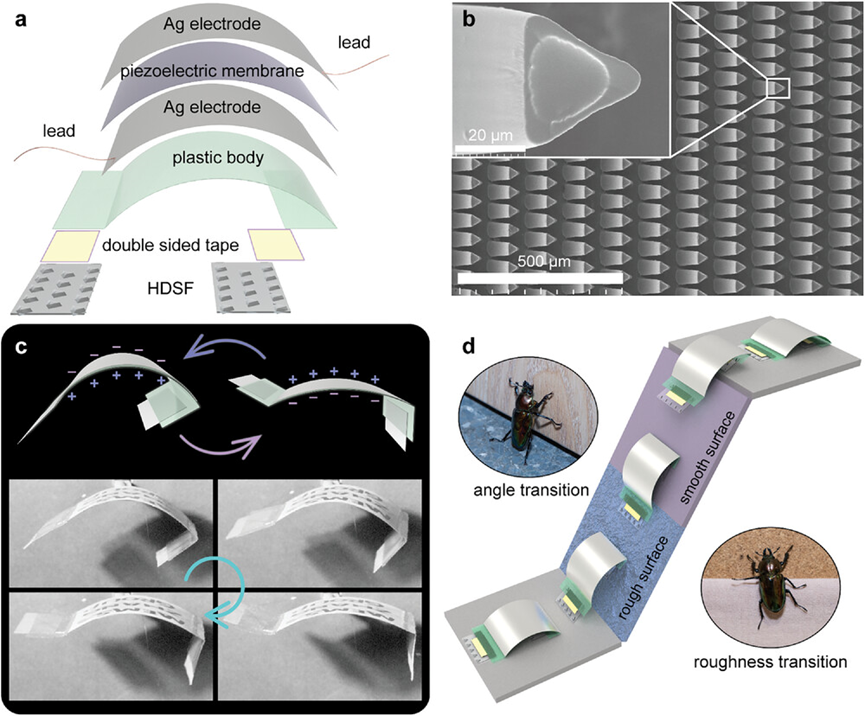
图1:压电攀爬者的设计原理与功能简介。
适用于软体驱动器的仿生足垫设计与性能
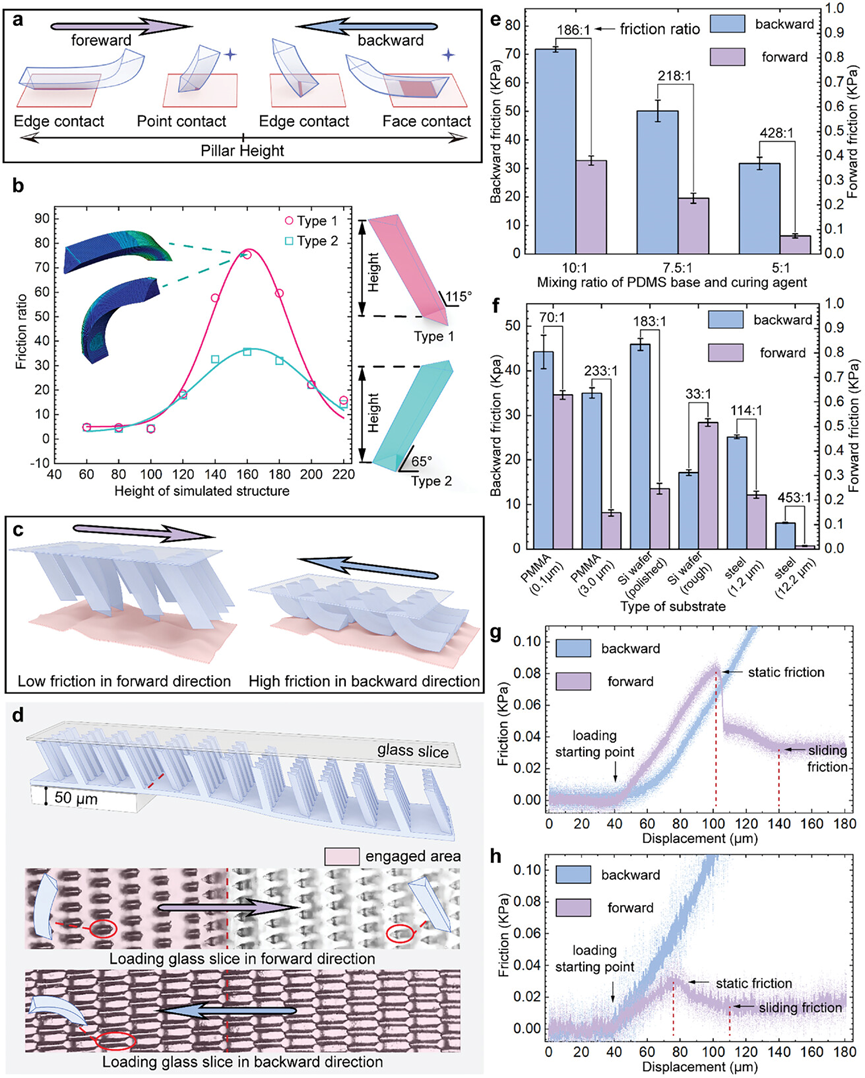
针对仿生足垫的微棱柱结构,作者首先进行了原理设计与有限元仿真。在前进过程中,微棱柱与攀爬表面的接触情况随着棱柱结构不同而有两种不同的情况:当棱柱短而粗时,三棱柱的顶点与攀爬表面接触;当棱柱长而细时,三棱柱的侧棱与攀爬表面接触(图2a)。在后退过程中,与前进过程类似,当棱柱短而粗时,三棱柱的顶面棱边与攀爬表面接触;而当棱柱长而细时,三棱柱的侧面与攀爬表面接触。为了实现前进时摩擦力较小而后退时摩擦力较大,最佳的三棱柱结构将在前进时与攀爬表面点接触而在后退时与攀爬表面面接触。作者随后通过有限元仿真模拟了此类接触问题并得到了理想的三棱柱结构参数(图2b)。此外,得益于棱柱的倾斜结构,仿生足垫在前进时只有很少一部分棱柱参与接触,而在后退时几乎所有的棱柱都将参与接触,从而进一步提升了仿生足垫的摩擦方向性(图2c,d)。作者随后通过足垫后退时的摩擦力与前进时的摩擦力之比,即摩擦比,比较了不同组分对摩擦方向性的影响(图2e)。作者随后对足垫在不同粗糙表面上的摩擦比测试表明足垫在不同粗糙度的表面上均具有较高摩擦比,为随后压电攀爬者的多地形攀爬提供了有利条件(图2f)。不仅如此,作者还分析了仿生足垫在前向运动时的起始滑动位移,实验数据表明足垫在受到100微米以内的推动距离时即开始发生滑动,这也与压电薄膜有限的输出位移相匹配(图2g,h)。
压电攀爬者的多地形攀爬能力测试
为了测试机器人的攀爬能力,机器人首先测试了压电攀爬者的输出方向性。通过对有足垫和无足垫的输出力进行比较发现,当无足垫时,压电攀爬者的压电驱动器不能输出方向性的摩擦力;而当贴附足垫之后,压电攀爬者前后腿都只在后退时输出摩擦力,证明了将仿生足垫与柔性压电驱动器结合从而制备攀爬机器人的可行性。此后,作者借助高速摄像机对压电攀爬者的攀爬步态进行了运动学分析。分析表明,压电攀爬者在攀爬时前腿有向前滑动并抬起的动作,而后腿有空中摇摆动作,这两个动作的结合使得压电攀爬者可以防止其前后腿被卡住,轻松越过攀爬过程中所遇到的障碍。为了证明这一点,作者在垂直的乐高积木上对压电攀爬者的攀爬能力成功地进行了验证,期间所使用的乐高积木表面具有高度为2毫米的突起。此外,作者统计了压电攀爬者在不同电压、不同频率以及不同垂直攀爬表面的攀爬速度。在所进行的统计研究中,压电攀爬者在粗糙的聚甲基丙烯酸甲酯具有最高的攀爬速度,为1.4身位每秒。此外,作者还发现足垫在运动过程中会与攀爬表面产生摩擦电,以及压电薄膜的驱动电压会在足垫处产生感应电荷以辅助攀爬。机器人在低频率下的0~180°攀爬随后在粗糙的钢铁表面得到验证,且压电攀爬者在攀爬天花板过程中可以抵抗一定的水平及竖直震动。
压电攀爬者的跨越攀爬能力
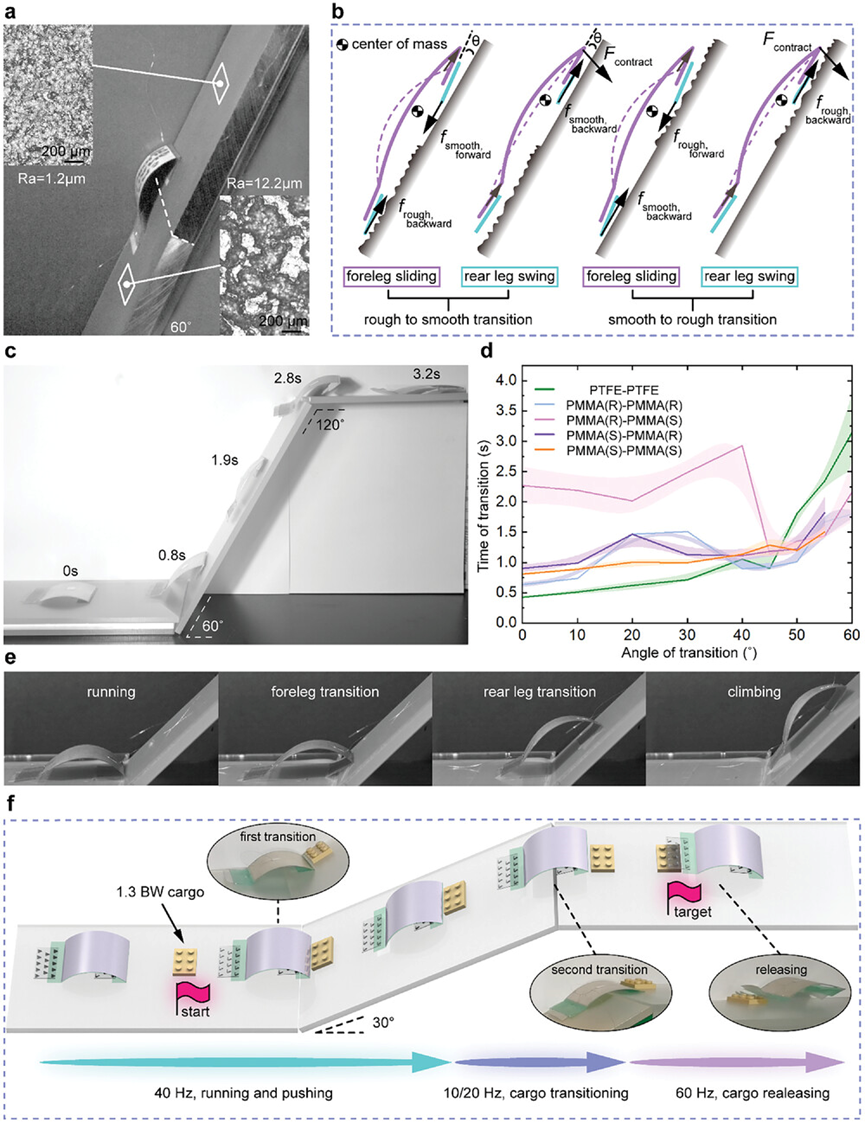
得益于软体机器人的机械鲁棒性以及仿生足垫的优越性能,压电攀爬者还可以在攀爬过程中在粗糙程度不同的表面之间进行跨越(图4a)。此外,作者还研究了完成此类粗糙度跨越的力学条件(图4b)。不仅如此,压电攀爬者还可以在5s内完成0°-60°-0°表面之间的自主跨越攀爬(图4c)。随后,作者统计了压电攀爬者在不同倾斜角度和不同材质种类的表面之间进行跨越的时间(图4d),并借助高速摄像机对跨越过程进行了分析研究(图4e)。针对机器人的实际应用场景,压电攀爬者展示了在倾斜角度差别为30°的三个表面之间进行货物(重量为1.3倍的机器人自重)携带、运输以及释放的能力(图4f)。
压电攀爬者的小型化以及越障能力
为了进一步展现压电攀爬者方案的普适性以及优越的运动能力,作者还对压电攀爬者进行了尺寸按比例压缩以制作小型压电攀爬者(30mm长22mm宽4mm高)。小型压电攀爬者同样具有滑动-抬起的运动步态(图5a),并在水平表面具有超过13身位每秒的奔跑速度(图5b)。小型压电攀爬机器人在运动过程中包含更强烈的跳跃运动,这使得其能越过三倍于自己身高的障碍物(图5c,d)。除此之外,小型压电攀爬者还可以在0.75倍身高的受限窄缝中进行穿梭(图5e),并越过30°的台阶陡坡(图5f)。小型压电攀爬者的严格前向运动还使其具备了一定的物理智能,能够轻松逃脱任意布置的乐高积木迷宫(图5g)。
上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。
