近日,由曼彻斯特大学、牛津大学、吉林大学、索尔福德大学等多所机构组成的国际研究团队,在Nature Communications期刊上发表了一篇重要研究成果,题为Human tactile sensing and sensorimotor mechanism: from afferent tactile signals to efferent motor control。该研究首次结合人体神经传导实验、人手数字孪生模型、多层级神经动态模型和类人仿生手物理验证,成功预测了基于触觉感知生物力学和膜转导动力学的神经响应特性,揭示了触觉感知信号如何转化为肌肉运动神经控制的复杂过程。这一研究不仅是对触觉感知神经科学的重要贡献,也为下一代类人仿生手和神经假肢的开发提供了新的理论基础。
【研究目标与要点】
该研究首次结合人体神经传导实验、人手数字孪生模型、多层级神经动态模型,成功预测了基于触觉感知生物力学和膜转导动力学的神经动态响应,揭示了触觉感知信号如何转化为运动神经控制的复杂过程。团队通过一系列实验,在自主研制的仿生手系统上恢复了接近94%的人体触觉能力。这一仿生手不仅能够模拟人类手部在接触不同物体时的神经信号传导,还展示了与人体自然手部动作非常相似的基于触觉感知的肌肉神经控制特性。例如,在不同形状和大小的物体抓握实验中,仿生手的成功率达到人手的94%,并且能够精准地再现人体在不同接触条件下的神经动态行为。研究还显示,该仿生手系统在触觉信号解码和神经运动控制上的表现与真实生物系统的误差低于10%,为未来仿生手和假肢手的开发提供了关键的数据支持。这不仅是对触觉神经科学的重要贡献,也为下一代仿生手和神经假肢的开发提供了新的理论基础和技术路径。
【研究方法与创新点】
在本研究中,研究团队提出了一种创新性的方法,结合人体神经传导实验、人手数字孪生模型和神经动态模型,成功实现了对人手触觉感知信号和运动神经信号的预测和解码。研究利用微神经测试技术获取了皮肤接触刺激时的感知神经信号,并通过与人手数字孪生模型的结合,验证了模型的准确性。具体来说,我们开发了一个多层级神经系统模型,能够计算人手与外部物体接触时的应变能密度(SED),并将其转化为神经动态信号(图1)。该模型不仅能够模拟生物皮肤的触觉反应,还可以预测神经元的动态响应。在此基础上,研究团队进一步解码了触觉信号到运动神经信号的转换关系,提出了新的转换函数概念。这些函数通过描述神经信号的动态变化,揭示了触觉感知如何被转化为肌肉激活信号,进而驱动手部运动。这一解码机制的发现,为进一步开发具有类人特性的仿生手和假肢系统奠定了理论基础。
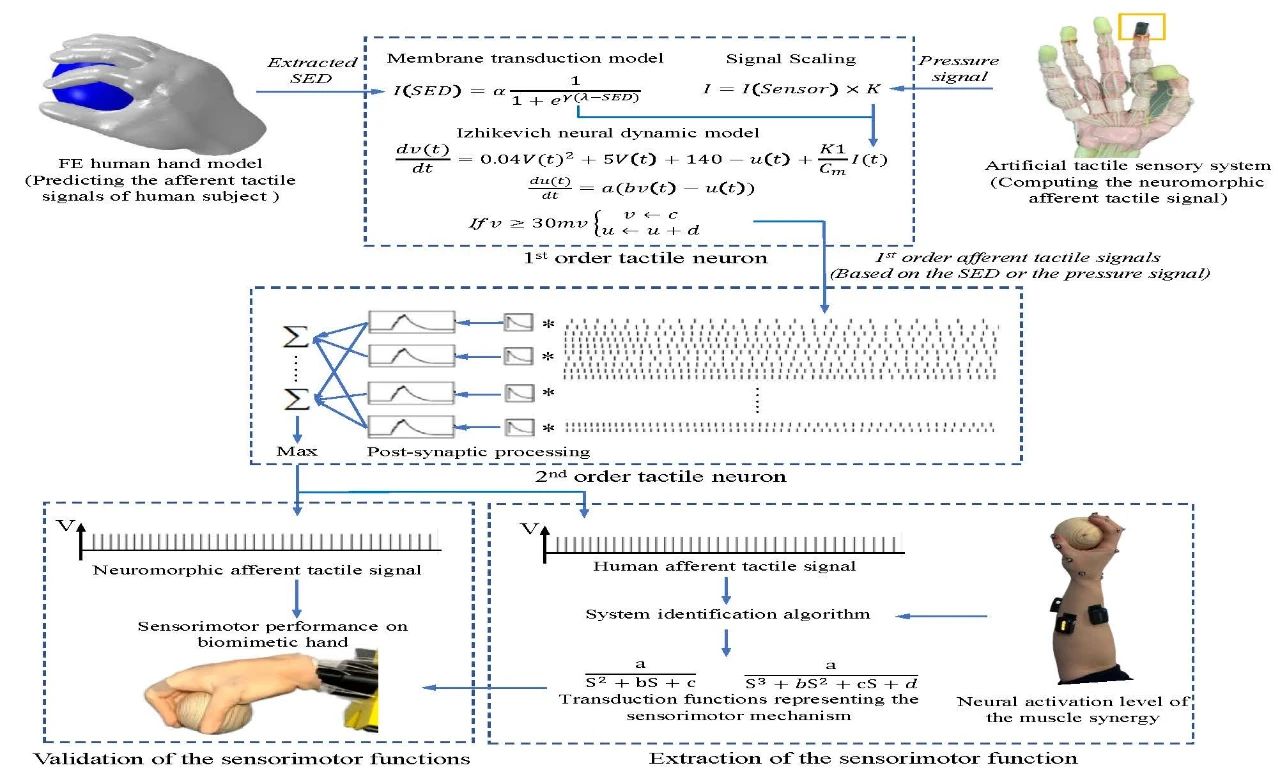
图1 基于触觉感知的多层级运动神经控制
【研究结果与数据分析】
通过大量的实验与仿真模拟(图2),研究结果表明,我们的神经动态模型,可以精确预测不同条件下的感知触觉信号和运动神经响应。例如,在对比实验中,我们的模型成功模拟了在与不同形状(如圆柱形和球形)物体接触时,神经信号的变化情况,并与真实的生物神经信号进行比较。结果显示,两者之间的差异低于15%。这意味着,我们的模型在重建人类触觉感知机制方面具有高度的准确性和可靠性。
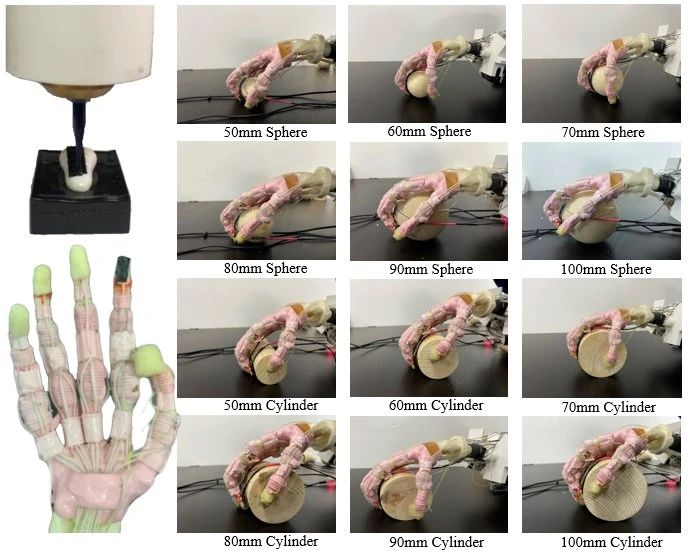
图2 在自主研发的仿生手上重现人体的触觉感知
此外,研究还发现,触觉信号的解码不仅与接触物体的形状有关,还与物体的大小密切相关。通过比较不同直径的圆柱体和球体的触觉信号,我们发现直径越小的物体会产生更高频率的神经信号(图3)。这些发现不仅深化了我们对触觉感知机理的理解,也为未来的神经假肢系统提供了重要的数据支持。
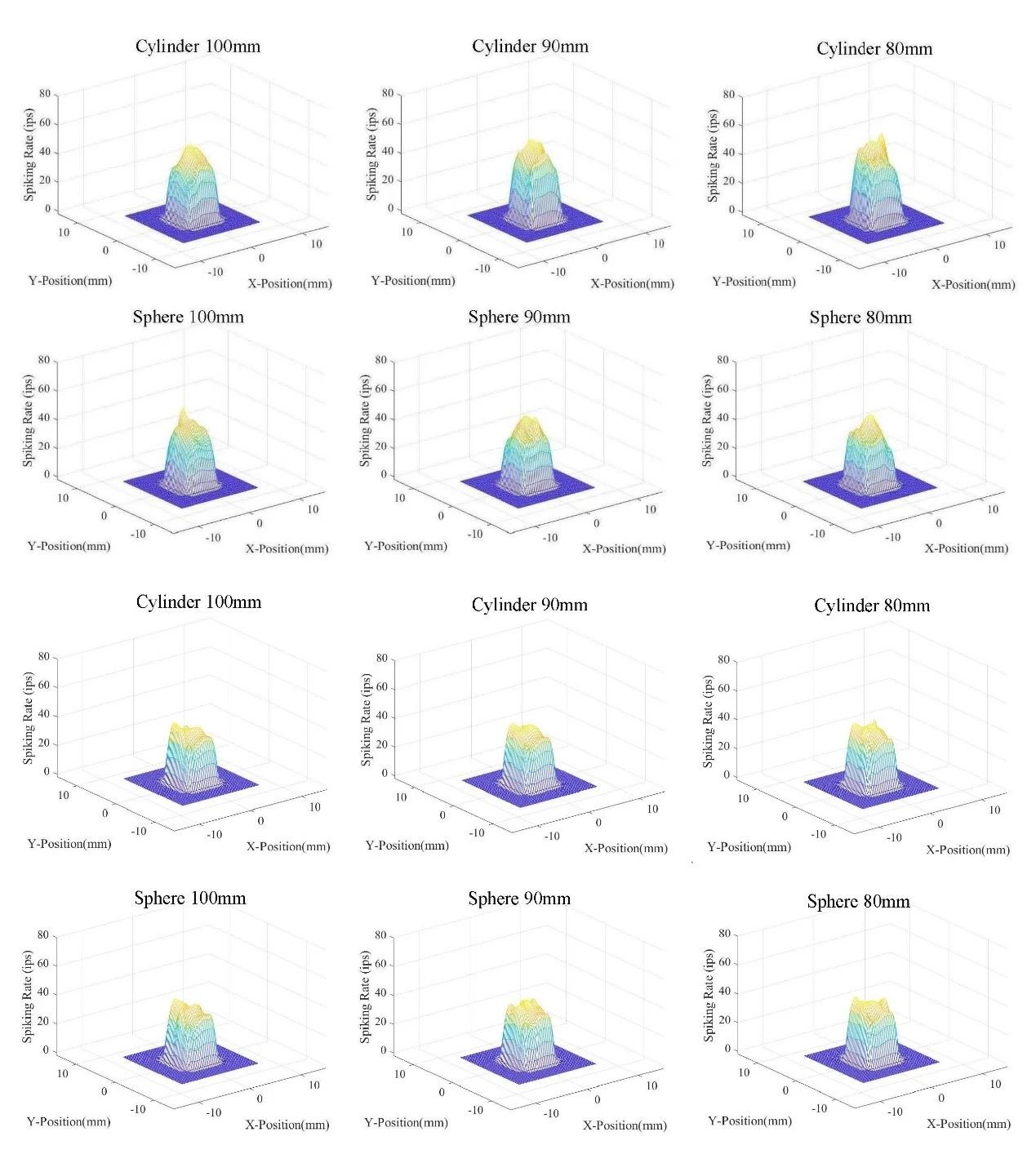
图3 神经形态触觉信号的激发频率
【工作价值与应用前景】
本研究的价值不仅在于揭示了从人手触觉感知到肌肉运动神经控制的复杂过程与机制,更在于其对未来机器人和智能假肢技术的重大意义。首先,这一研究为神经假肢的发展提供了新的理论基础。通过理解触觉感知信号如何被解码为运动神经指令,我们可以开发出更智能、更类人的假肢系统,使其能够更好地模仿人类的自然运动 (图4)。这对于那些失去手部功能的患者来说,无疑是一个巨大的福音。
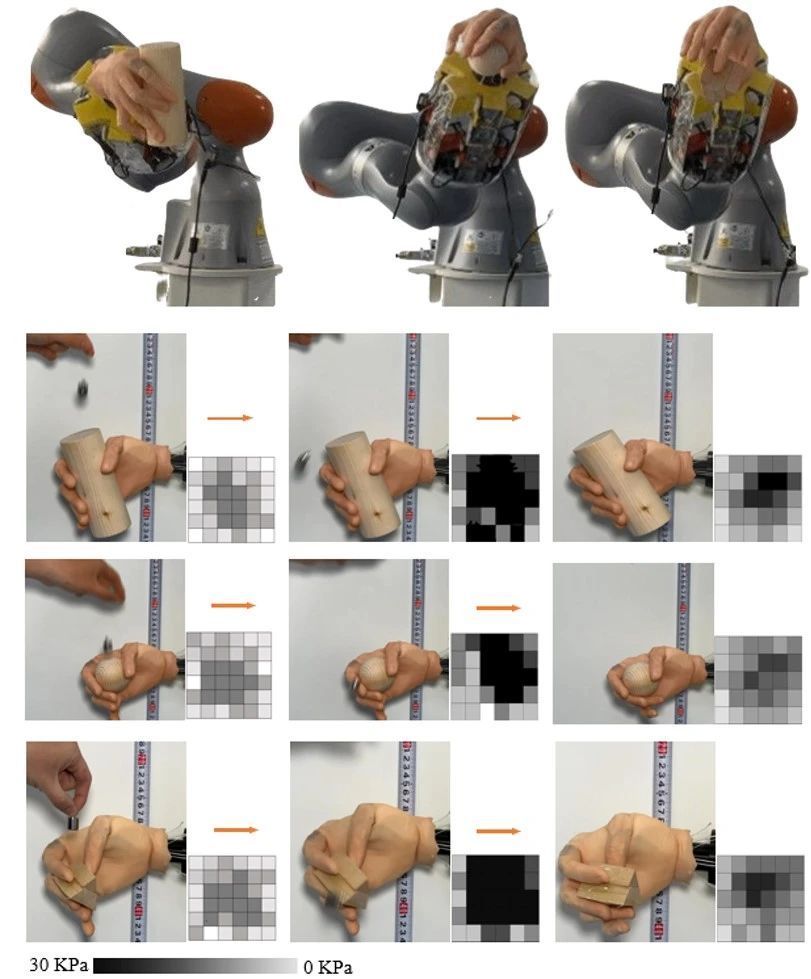
图4 具有触觉感知运动神经系统的仿生手出现类人的主动和反应性抓握动作
其次,在仿生机器人领域,这一研究也具有重要的应用潜力。随着机器人技术的发展,如何让机器人具备类人感知和运动能力,是当前的一个重要课题。我们的研究成果为开发具有高精度触觉感知与运动控制能力的仿生机器人提供了科学依据和技术支持(图5)。最后,该研究还为进一步探索人类神经系统的工作原理开辟了新途径。通过精确解码触觉信号的转换机制,我们可以更好地理解大脑与外界环境的交互过程,这对神经科学的发展具有深远的影响。
论文第一作者为魏宇阳,博士毕业于英国曼彻斯特大学,现就职于英国牛津大学工程科学系,论文通讯作者为曼彻斯特大学/吉林大学任雷教授和索尔福德大学魏国武教授。
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。
