基于机械的超材料,包括由柔性铰链连接的刚性元件,有潜力开发出具有可编程运动性和形态的智能微型机器。然而,高效微执行器的缺失限制了在微米和纳米尺度上实现多模式运动以及主动形状变形行为的能力。
近日,北京大学Tian-Yun Huang团队从微小昆虫的飞行机制中获得灵感,通过将柔顺机构与软水凝胶肌肉相结合,开发出一种仿生微铰链执行器。引入了伪刚体力学模型来分析结构变形,结果表明这种基于水凝胶的微执行器在保持较高结构刚度的同时能够发生显著的折叠。此外,将多个微铰链执行器组合起来,可实现多自由度和任意方向的折叠。通过多步骤四维(4D)直接激光写入技术制造出的微铰链执行器被集成到二维和三维超材料中,从而实现可编程的形状变形。此外,还展示了带有光子结构的微剪纸,以呈现由微铰链驱动的图案变换。这种受生物启发的设计方法为开发能够实现复杂形状变形行为的基于主动机制的超材料开辟了新的途径。研究成果以题为“Bioinspired Microhinged Actuators for Active Mechanism-Based Metamaterials”发表于《Advanced Science》上。
图1:仿生微铰链致动器原理图。
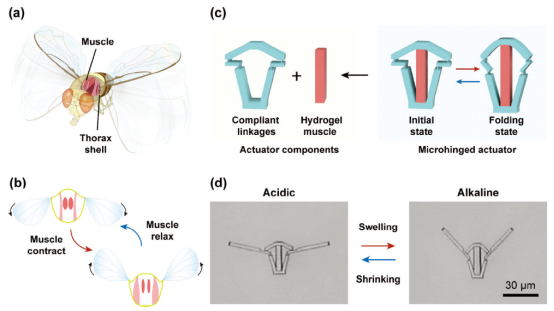
图2:连杆机构几何参数对变形的影响。
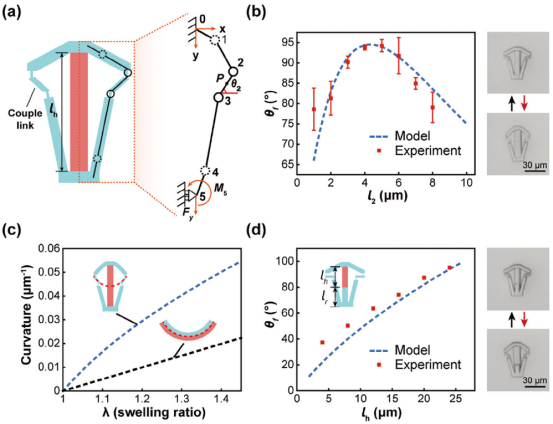
图3:仿生微铰执行器的设计与有限元仿真
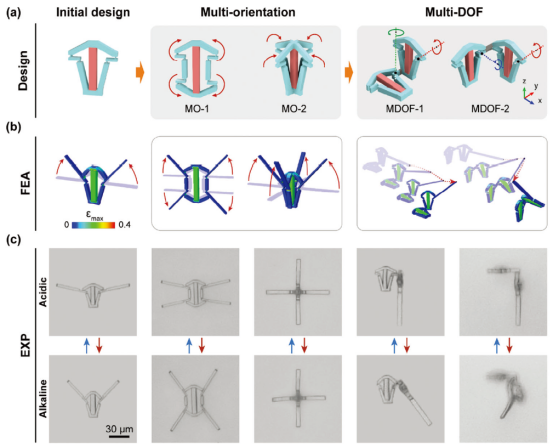
图4:采用微铰链作动器的微型基利米的制作工艺。
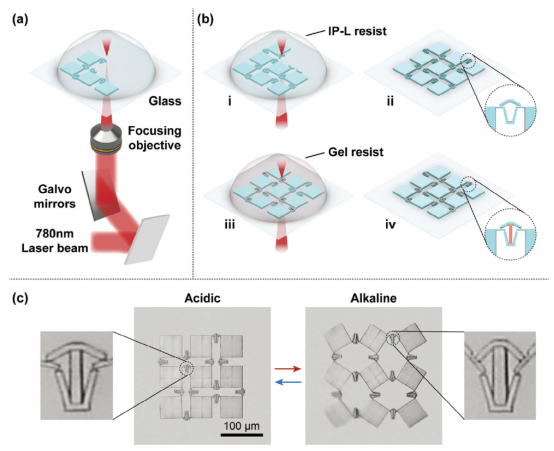
图5:具有仿生微铰致动器的主动机构超材料的实验结果。
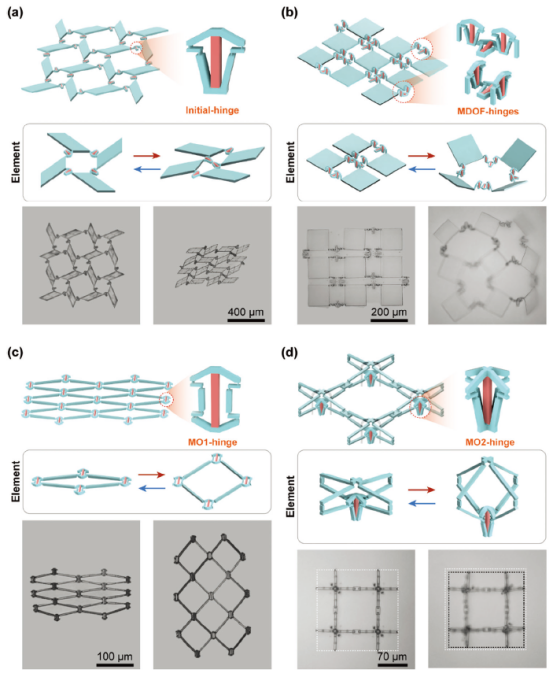
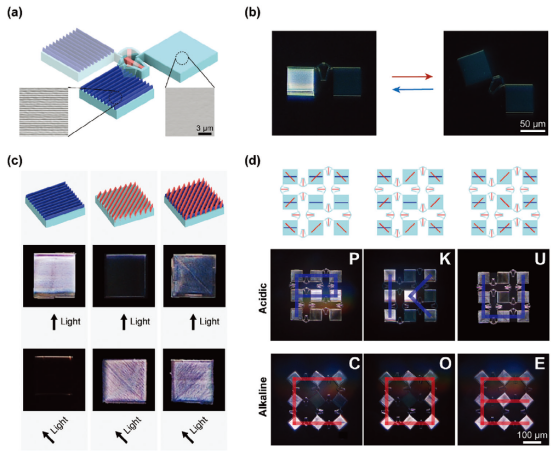
图6:集成微铰致动器的微光子超材料的形状变形。
以上文章转载于微信公众号今日新材料,如有侵权,请及时联系我们修改或进行删除。
信息发布人: Tian-Yun Huang
发布单位: 北京大学
信息源: https://doi.org/10.1002/advs.202407231
