Honglin Shen, Shuxiang Cai, Zhen Wang, Zheng Yuan, Haibo Yu & Wenguang Yang
1 School of Electromechanical and Automotive Engineering, Yantai University, Yantai, 264005, China
2 State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang, 110016, China
Abstract
With the growing demand for miniaturized workspaces, the demand for microrobots has been increasing in robotics research. Compared to traditional rigid robots, soft robots have better robustness and safety. With a flexible structure, soft robots can undergo large deformations and achieve a variety of motion states. Researchers are working to design and fabricate flexible robots based on biomimetic principles, using magnetic fields for cable-free actuation. In this study, we propose an inchworm-shaped soft robot driven by a magnetic field. First, a robot is designed and fabricated and force analysis is performed. Then, factors affecting the soft robot’s motion speed are examined, including the spacing between the magnets and the strength and frequency of the magnetic field. On this basis, the motion characteristics of the robot in different shapes are explored, and its motion modes such as climbing are experimentally investigated. The results show that the motion of the robot can be controlled in a two-dimensional plane, and its movement speed can be controlled by adjusting the strength of the magnetic field and other factors. Our proposed soft robot is expected to find extensive applications in various fields.
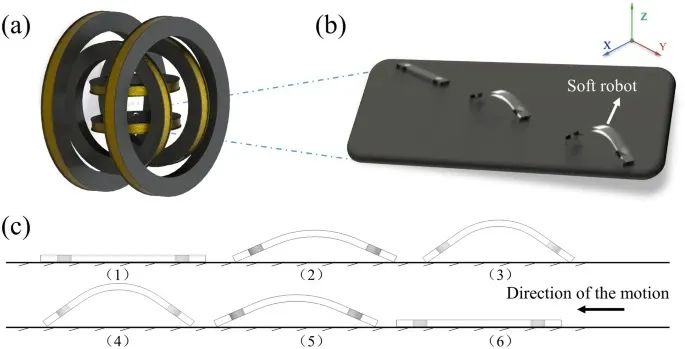
Fig. W1 a Schematic diagram of the magnetically driven soft robot. b Schematic diagram of the soft robot’s motion. c Steps in the soft robot’s motion cycle
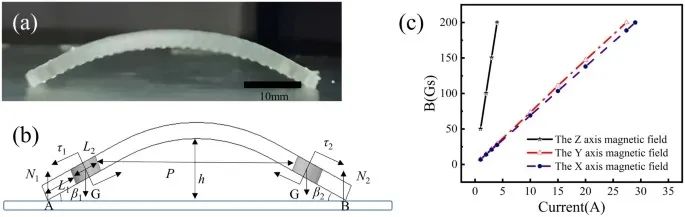
Fig. W2 a Deformation of the soft robot. b Force analysis of the soft robot. c The relationship between the strength of the magnetic field and the current
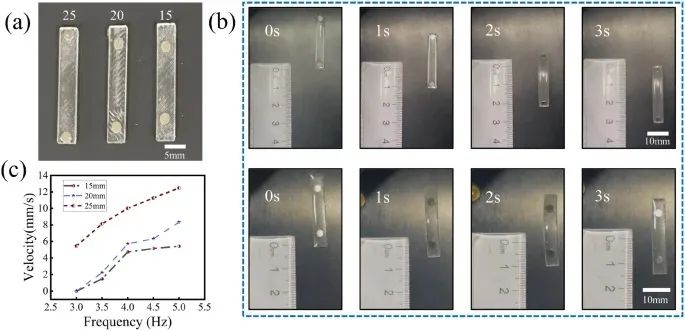
Fig. W3 a Soft robots with different magnet spacings: 25 mm, 20 mm, and 15 mm, from left to right. b Images of soft robots with magnetic spacings of 25 mm and 15 mm driven by the same magnetic field. c Movement speed of strip-shaped soft robots with different magnet spacings (25 mm, 20 mm, and 15 mm)
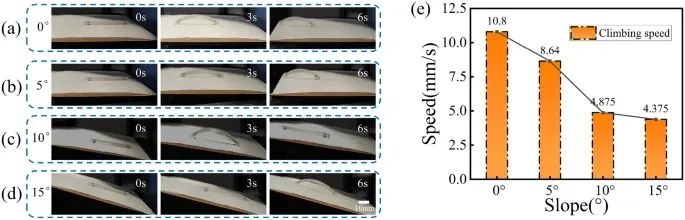
Fig. W4 Climbing testing at different slopes. a Movement at a slope of 0°. b Movement at a slope of 5°. c Movement at a slope of 10°. d Movement at a slope of 15°. e Climbing speeds at different slopes (0°, 5°, 10°, and 15°)
Information Publisher: Honglin Shen, Shuxiang Cai
Information Release Unit: Yantai University、Shenyang Institute of Automation
Information Source: https://rdcu.be/c6wnR
