引文信息:
Qingsong He, Guoxiao Yin, David Vokoun, Qi Shen, Ji Lu, Xiaofang Liu, Xianrui Xu, Min Yu & Zhendong Dai. Review on Improvement, Modeling, and Application of Ionic Polymer Metal Composite Artificial Muscle. Journal of Bionic Engineering, 2022, 19(2),279–298
Review on Improvement, Modeling, and Application of Ionic Polymer Metal Composite Artificial Muscle
Qingsong He, Guoxiao Yin, David Vokoun, Qi Shen, Ji Lu, Xiaofang Liu, Xianrui Xu, Min Yu & Zhendong Dai
1 Jiangsu Provincial Key Laboratory of Bionic Functional Materials, Institute of Bio-Inspired Structure and Surface Engineering, College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing, 210016, China
2 Institute of Physics of the Academy of Sciences of the Czech Republic, Prague, 182 21, Czech Republic
3 Active Materials and Smart Living Laboratory, Department of Mechanical Engineering, University of Nevada Las Vegas, Las Vegas, 89154-4027, USA
Abstract
Recently, researchers have concentrated on studying ionic polymer metal composite (IPMC) artificial muscle, which has numerous advantages including a relatively large strain under low input voltage, flexibility, high response, low noise, light weight, and high driving energy density. This paper reports recent developments in IPMC artificial muscle, including improvement methods, modeling, and applications. Different types of IPMCs are described, along with various methods for overcoming some shortcomings, including improvement of Nafion matrix membranes, surface preparation of Nafion membranes, the choice of high-performing electrodes, and new electro-active polymers for enhancing the properties of IPMCs. IPMC models are also reviewed, providing theoretical guidance for studying the performance and applications of IPMCs. Successful applications such as bio-inspired robots, opto-mechatronic systems, and medical engineering are discussed.
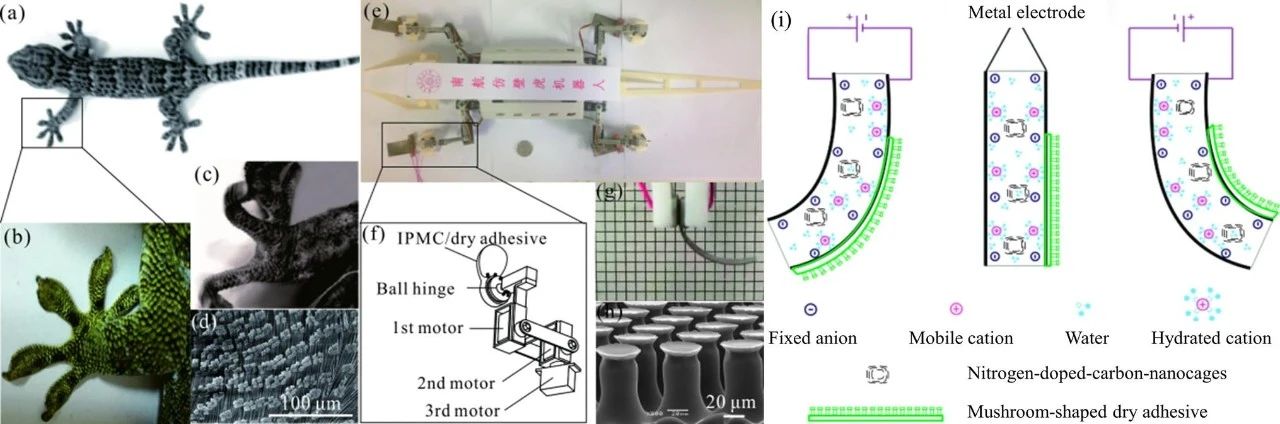
Fig. W1 The IPMC-based electro-active adhesive inspired by the gecko toe by He et al. [17]. a, b Gecko's toes. c, d Bristle structures on the toes of geckos. e Gecko-like robot with IPMC as toes. f Structure diagram of the gecko-like robot’s leg. g IPMC actuator based on nitrogen-doped carbon nanocages enhancement. h Adhesive material similar to gecko bristle structure. i Schematic diagram of IPMC driver with dry adhesive material
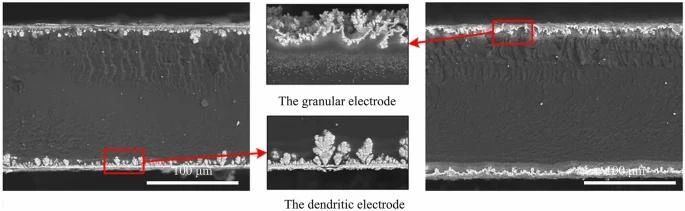
Fig. W2 The SEM image of the Au electrode with dendritic structure prepared by Wang et al.
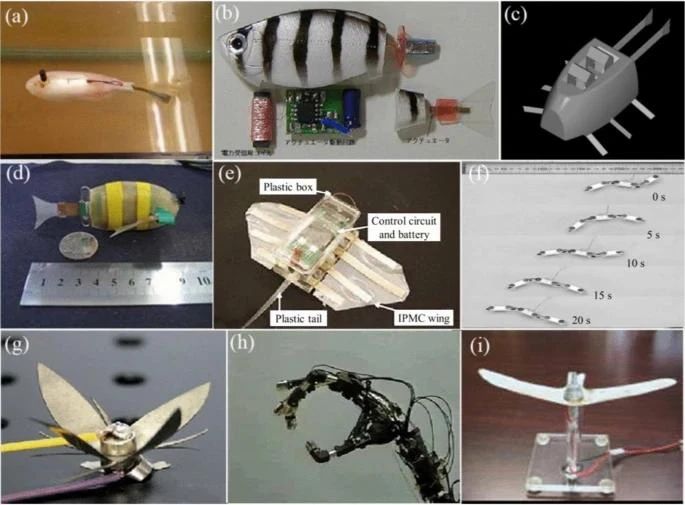
Fig. W3 The application of IPMC in robot actuators. a–d Robotic fish with the tail fin muscle ; e Manta ray robot derived by IPMC ; f Snake-like robot using IPMC ; g The bionic flower made by IPMC, which can effectively simulate the expansion and closing of the flower ; h The gripper with multiple freedom joints made by IPMC ; i The bionic flapping wing device made by IPMC can simulate the vibration of the flapping wing.
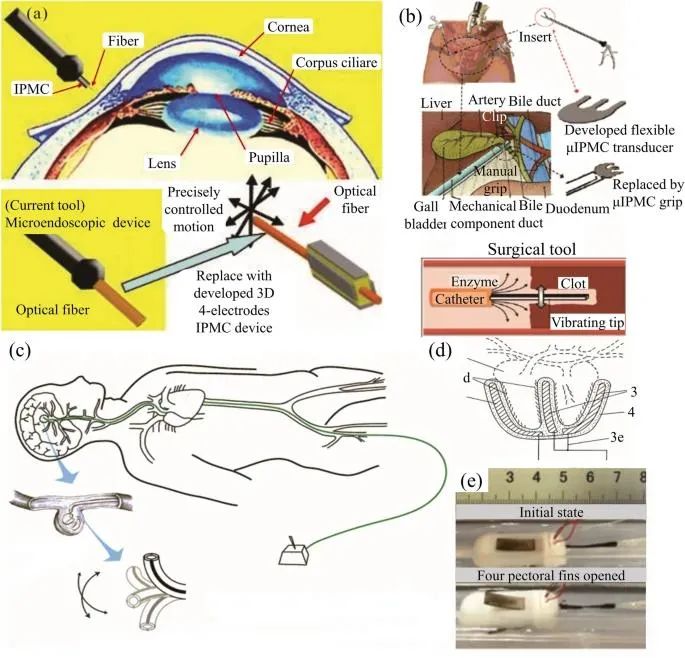
Fig. W4 The application of IPMC in medical engineering. a Optical fiber actuator for microscopic eye surgery ; b Microsurgical forceps ; c Active catheter; d Cardiac auxiliary diastolic device ; e Capsule endoscopic control.
Information Publisher: Qingsong He, Guoxiao Yin, David Vokoun, Qi Shen, Ji Lu, Xiaofang Liu, Xianrui Xu, Min Yu & Zhendong Dai
Information Source: https://rdcu.be/cJqQd
