(Nanowerk News) A robot nicknamed ‘Morphobot' (M4), designed to travel over various terrains on land and in the air by transforming its appendages between wheels, propellors, legs, and hands, is described in Nature Communications ("Multi-Modal Mobility Morphobot (M4) with appendage repurposing for locomotion plasticity enhancement").
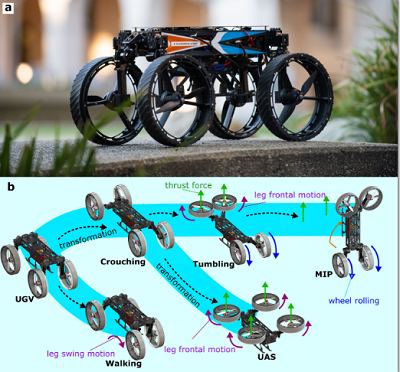
The robot — inspired by animals such as birds, meercats, and seals —can perform different modes of movement to navigate its environment, including flying, rolling, crawling, crouching, balancing, and tumbling.
(Image: Eric Sihite et al., Nature Communications)
The findings could help improve the design of robots that travel through diverse environments, such as those used in search and rescue responses after natural disasters, space exploration, and automated package delivery.
Some animals can adapt the use of their limbs to allow them to tackle different terrains. For example, sea lions can walk on land using their flippers, meerkats can stand on their hindlimbs to scout their surroundings, and chukar birds can use their wings to walk on all fours up steep inclines. By mimicking animals' limb repurposing abilities, mobile robots can be designed with multi-functional limbs to navigate complex terrains by adapting their movement strategies.
Inspired by animals, Alireza Ramezani and colleagues designed M4, a robot with four legs each comprising two joints, along with ducted fans fixed at the leg ends. The robot weighs 6kg, is 70cm in length, and 35cm in height and width 35cm wide and tall. The fans are able to transition between functioning as legs, propellor thrusters, or wheels. M4 is able to adapt its movements to walk on rough terrain, traverse steep slopes, tumble over large obstacles, fly to higher levels, and crawl under low-ceiling pathways.
The findings demonstrate the advantages of designing robots with multipurpose appendages to travel over varied and challenging terrains.
Information Source: https://www.nature.com/articles/s41467-023-39018-y
