引文信息:
Ziyi Yang, Shuxiang Guo, Keisuke Suzuki, Yi Liu & Masahiko Kawanishi.An EMG-Based Biomimetic Variable Stiffness Modulation Strategy for Bilateral Motor Skills Relearning of Upper Limb Elbow Joint Rehabilitation. Journal of Bionic Engineering,2023,20(4),1597–1612.
An EMG-Based Biomimetic Variable Stiffness Modulation Strategy for Bilateral Motor Skills Relearning of Upper Limb Elbow Joint Rehabilitation
Ziyi Yang, Shuxiang Guo, Keisuke Suzuki, Yi Liu & Masahiko Kawanishi
1 Key Laboratory of Convergence Medical Engineering System and Healthcare Technology, School of Life Science and Technology, Beijing Institute of Technology, Beijing, 100081, China
2 National Rehabilitation Center for Persons with Disabilities, Tokorozawa, 359-8555, Japan
3 Faculty of Medicine, Kagawa University, Takamatsu, Kagawa, 761-0793, Japan
Abstract
Bilateral rehabilitation systems with bilateral or unilateral assistive robots have been developed for hemiplegia patients to recover their one-side paralysis. However, the compliant robotic assistance to promote bilateral inter-limb coordination remains a challenge that should be addressed. In this paper, a biomimetic variable stiffness modulation strategy for the Variable Stiffness Actuator (VSA) integrated robotic is proposed to improve bilateral limb coordination and promote bilateral motor skills relearning. An Electromyography (EMG)-driven synergy reference stiffness estimation model of the upper limb elbow joint is developed to reproduce the muscle synergy effect on the affected side limb by independent real-time stiffness control. Additionally, the bilateral impedance control is incorporated for realizing compliant patient–robot interaction. Preliminary experiments were carried out to evaluate the tracking performance and investigate the multiple task intensities’ influence on bilateral motor skills relearning. Experimental results evidence the proposed method could enable bilateral motor task skills relearning with wide-range task intensities and further promote bilateral inter-limb coordination.
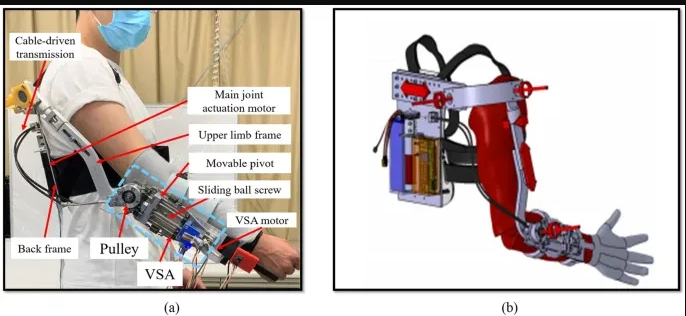
Fig. W1 Mechanical design of the PVSED. a Prototype of the PVSED worn by a subject. b Adaptive design for subject-individual body size.
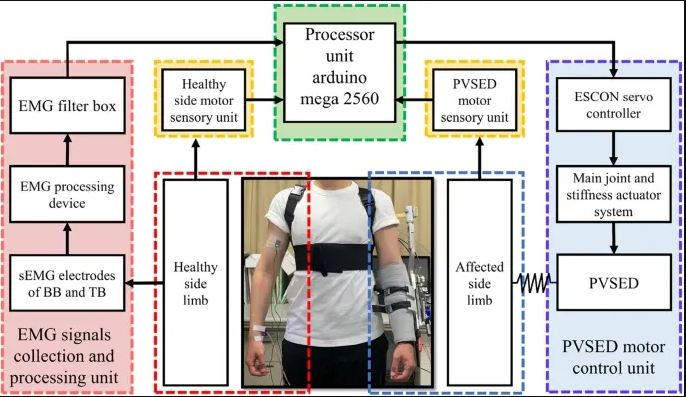
Fig. W2 Control system configuration diagram.
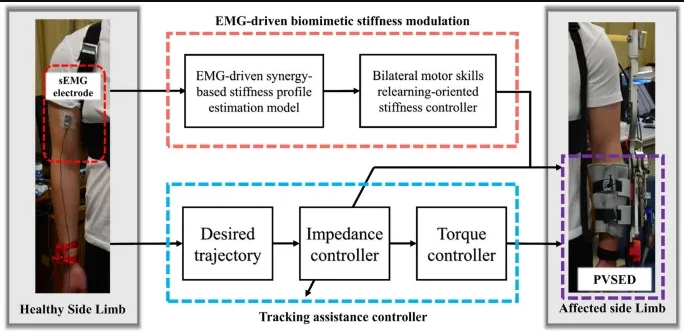
Fig. W3 Control framework.
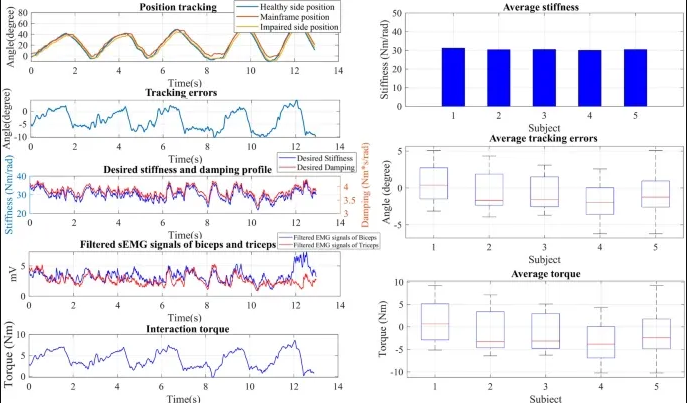
Fig. W4 Experimental results of 1.5 kg condition.
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。
Information Publisher: Ziyi Yang, Shuxiang Guo, Keisuke Suzuki, Yi Liu & Masahiko Kawanishi
Information Release Unit: Key Laboratory of Convergence Medical Engineering System and Healthcare Technology, School of Life Science and Technology, Beijing Institute of Technology, Beijing
Information Source: https://rdcu.be/dfwZi
