引文信息:
Pengxiao Bao, Liwei Shi, Lijie Duan, Shuxiang Guo & Zhengyu Li . A Review: From Aquatic Lives Locomotion to Bio-inspired Robot Mechanical Designations. Journal of Bionic Engineering,2023,20(6),2487 - 2511.
A Review: From Aquatic Lives Locomotion to Bio-inspired Robot Mechanical Designations
Pengxiao Bao, Liwei Shi, Lijie Duan, Shuxiang Guo & Zhengyu Li
1 School of Medical Technology, Beijing Institute of Technology, Beijing, 100081, China
2 School of Life Science, Beijing Institute of Technology, Beijing, 100081, China
3 The Key Laboratory of Convergence Medical Engineering System and Healthcare Technology, The Ministry of Industry and InformationTechnology, Beijing Institute of Technology, No. 5, Zhongguancun, South Street, Beijing, 100081, China
4 The Department of Electronic and Electrical Engineering, Southern University of Science and Technology, Shenzhen, 518055, Guangdong, China
Abstract
With the development of camera technology, high-speed cameras have greatly contributed to capturing the movement and posture of animals, which has dramatically promoted experimental biology research. At the same time, with the concept of bionics gradually gaining popularity among researchers, the design of robots is absorbing more and more biological features, where the interest in the bio-inspired robot is hewed out. Compared with the traditional robot, the bio-inspired robot imitates the motion pattern to achieve similar propulsion features, which may be more effective and reasonable. In this paper, the motion patterns of aquatic animals are divided into four categories according to their propulsion mechanisms: drag-based, lift-based, jet-based, and interface-based. And bio-inspired robots imitating aquatic prototypes are introduced and reviewed. Finally, the prospect of aquatic bio-inspired robots is discussed.
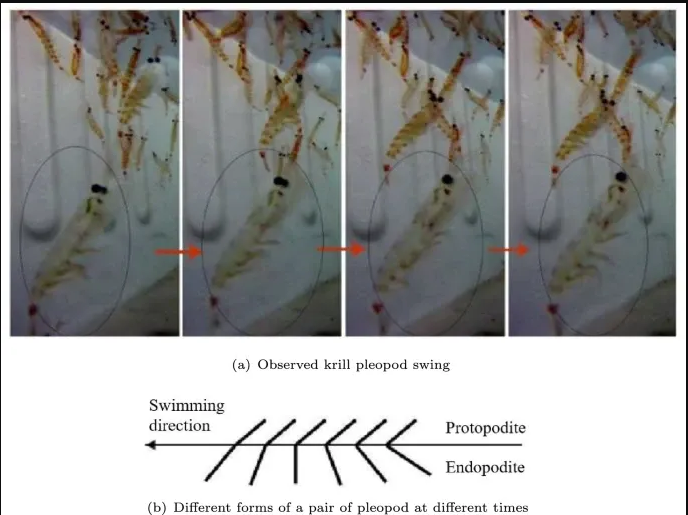
Fig. W1 The rythmic movements of krill gastropods.
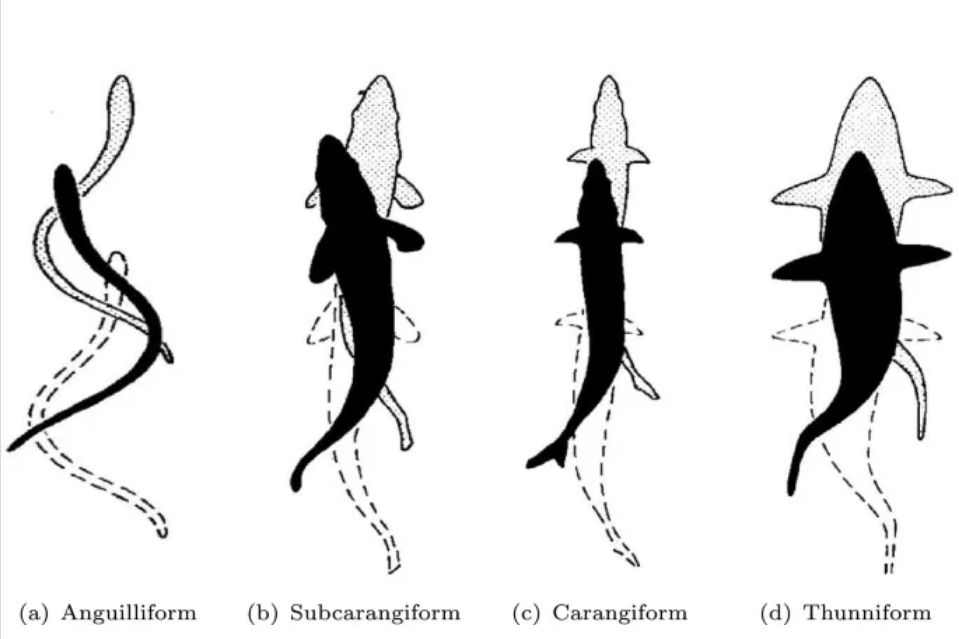
Fig. W2 Gradation of BCF swimming movements.
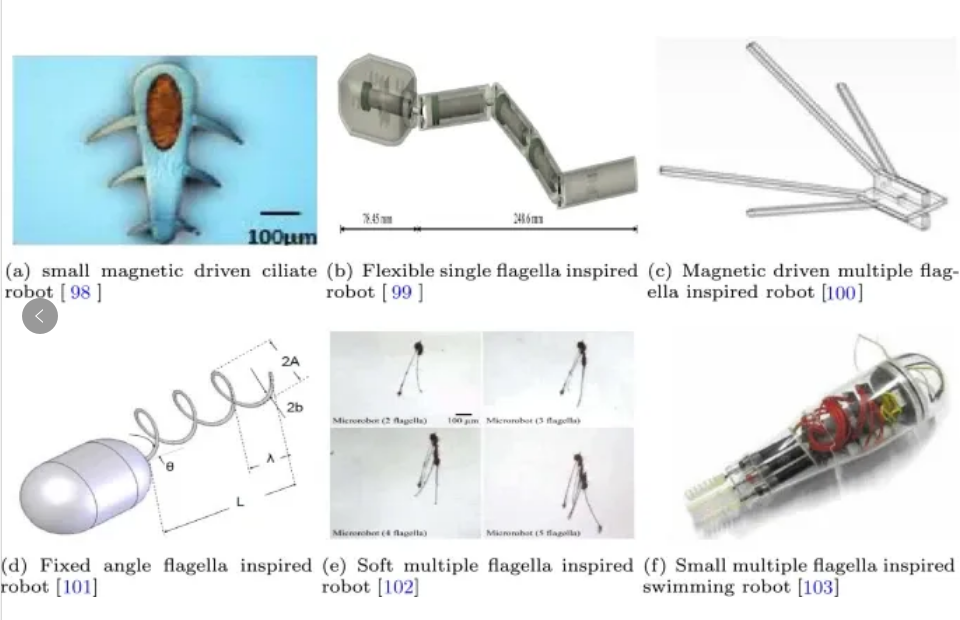
Fig. W3 Drag-based inspired robot. The prototype of the above robots are ciliates and flagellates .

Fig. W4 Interface-based inspired robot, where a–d use new materials to design the legs and d can extract electricity from the water surface to achieve self-proplled and e and f using Malagoni effect to propell.
Information Publisher: Pengxiao Bao, Liwei Shi, Lijie Duan, Shuxiang Guo & Zhengyu Li
Information Release Unit: School of Medical Technology, Beijing Institute of Technology
Information Source: https://rdcu.be/dqhNC
