引文信息:
Jianhao Liu, Mingjun Shen, Ziqiang Ma & Xinping Zhou.Research Progress on Bionic Water Strider Robots. Journal of Bionic Engineering,2024,21(2),635- 652.
Research Progress on Bionic Water Strider Robots
Jianhao Liu, Mingjun Shen, Ziqiang Ma & Xinping Zhou
1 School of Mechanical Science and Engineering, Huazhong University of Science and Technology, Wuhan, 430074, China.
2 State Key Laboratory of Intelligent Manufacturing Equipment and Technology, Huazhong University of Science and Technology, Wuhan, 430074, China.
Abstract
Biological water striders have advantages such as flexible movement, low disturbance to the water surface, and low noise. Researchers have developed a large number of biomimetic water strider robots based on their movement mechanism, which have broad application prospects in water quality testing, water surface reconnaissance, and search. This article mainly reviews the research progress of biomimetic water strider robots. First, the biological and kinematic characteristics of water striders are outlined, and some mechanical parameters of biological water striders are summarized. The basic equations of water strider movement are then described. Next, an overview is given of the past and current work on skating and jumping movements of biomimetic water strider robots based on surface tension and water pressure dominance. Based on the current research status of biomimetic water strider robots, the shortcomings of current research on biomimetic water striders are summarized, and the future development of biomimetic water strider robots is discussed. This article provides new insights for the design of biomimetic water strider robots.
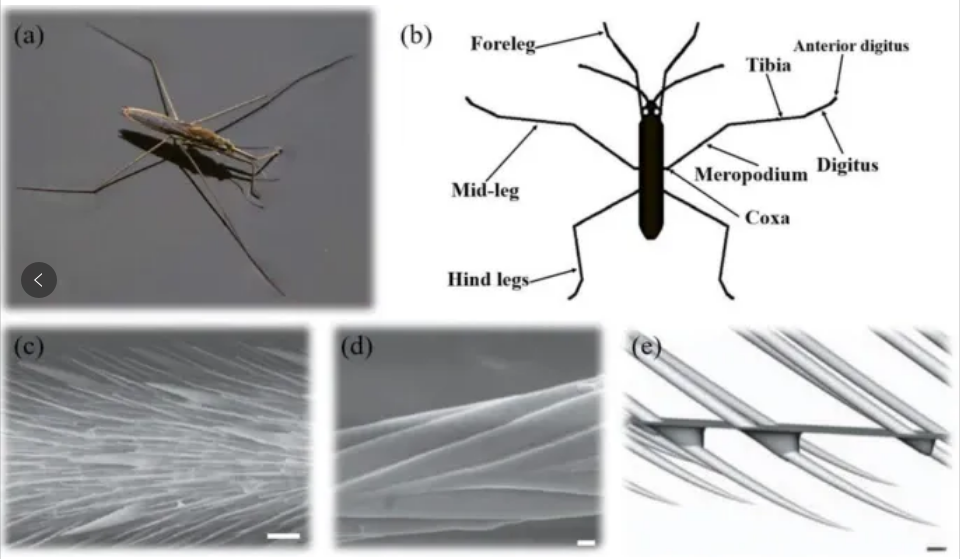
Fig. W1 a Bionic prototype: water strider. b Schematic diagram of the legs of a water strider. c Scanning electron microscope images of a leg showing numerous oriented spindly setae (Scale bar: 20 μm). d the nanoscale grooved structures on a seta (Scale bar: 200 nm). eFurther zooms of individual hairs penetrating the surface (Scale bar: 1 mm).
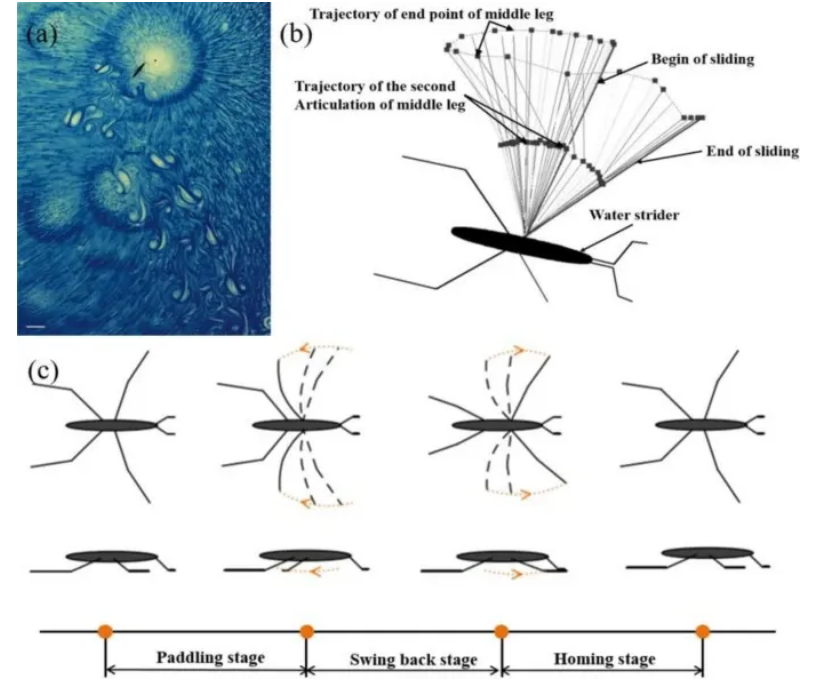
Fig. W2 Water strider movement trajectory. a The ambient texture results from Marangoni convection in the suspending fluid prompted by thymol blue on its surface. Scale bars, 1 cm. b Trajectory of mid-leg in horizontal plane. c Schematic diagram of water strider paddling process.
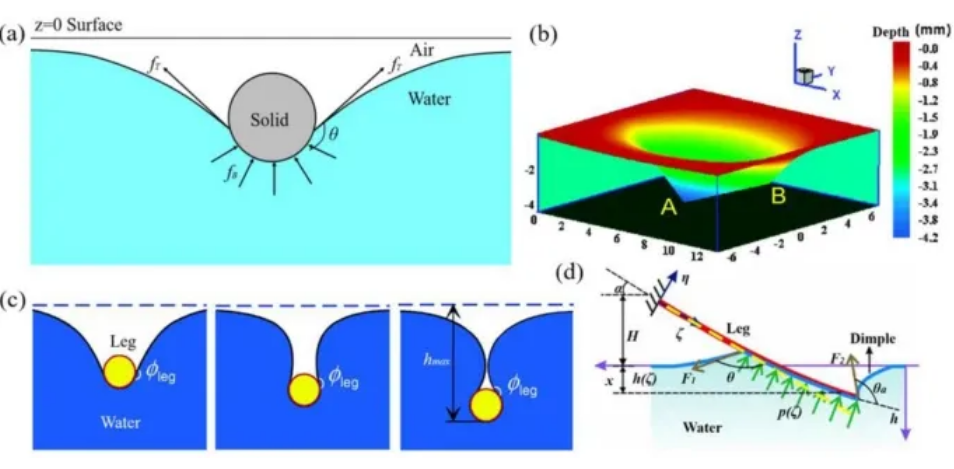
Fig. W3 a Force components acting on a partially submerged solid cylinder body. θ is the contact angle between the solid body and water. b Numerical results of the dimple caused by a hind leg. Three-dimensional topography of the dimple treaded by a hind leg. c Transects of the water surface for the leg contacting the water to different depths until the maximum depth hmax is reached before piercing the water surface. d Euler–Bernoulli beam model describing the deformation of the water strider leg.
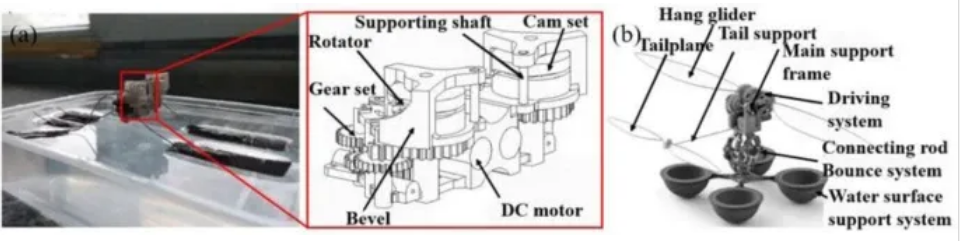
Fig. W4 a A biomimetic water strider robot with conversion between skating and jumping. b Water surface jumping and gliding robot.
Information Publisher: Jianhao Liu, Mingjun Shen, Ziqiang Ma & Xinping Zhou
Information Release Unit: School of Mechanical Science and Engineering, Huazhong University of Science and Technology
Information Source: https://rdcu.be/dCMah
