引文信息:
Jingmei Zhai, Rixing Li & Ziqing Su , Friction and Deformation Behavior of Human Skin During Robotic Sliding Massage Operation. Journal of Bionic Engineering,2024,21(4),1892- 1904.
Friction and Deformation Behavior of Human Skin During Robotic Sliding Massage Operation
Jingmei Zhai, Rixing Li & Ziqing Su
School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou, 510000, China.
Abstract
This study investigates the friction and deformation behavior of the skin in contact with a rigid massage ball and its influencing factors. Pressing and stretching experiments were conducted using a collaborative robot experimental platform. The experiments encompassed a loading normal force range of 2 N to 18 N and a sliding speed range of 10 mm/s to 20 mm/s. The friction response curve exhibits two different stages: static stick state and dynamic stick-slip stage, both of which have been mathematically modeled. By analyzing the experimental data, we analyzed the effects of elastic modulus, sliding speed and normal loading force on skin tangential friction and tensile deformation. The results indicate that as the normal load increases, both friction and deformation exhibit an increase. Conversely, they decrease with an increase in elastic modulus. Notably, while deformation diminishes with higher sliding speed, friction force remains relatively unaffected by velocity. This observation can be attributed to the strain rate sensitivity resulting from the viscoelastic characteristics of the skin under substantial deformation. This study advances the understanding of friction and deformation behavior during skin friction, offering valuable insights to enhance the operational comfort of massage robots.
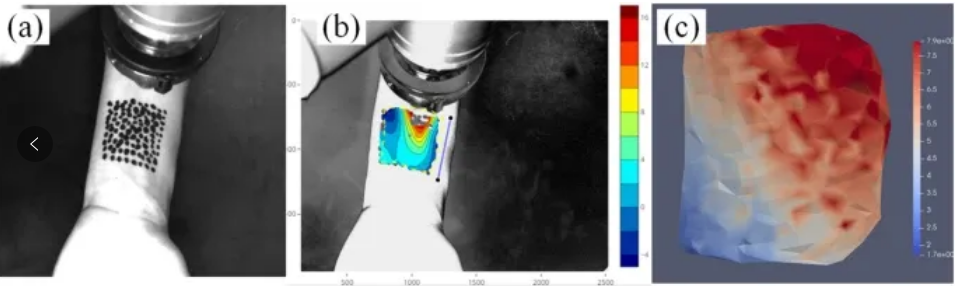
Fig. W1 DIC applied to measure forearm skin deformation. a Random scatterplot captured from the skin surface. b Image processed using the DIC algorithm. c Displacement field changes in the region of interest plotted in Paraview.
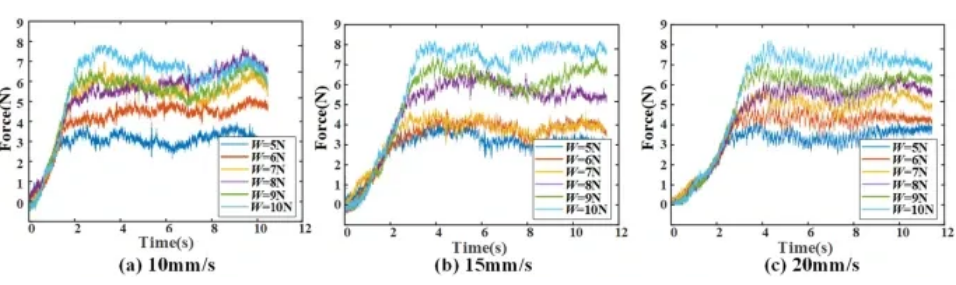
Fig. W2 Tangential force at different velocities (tester No. 4).
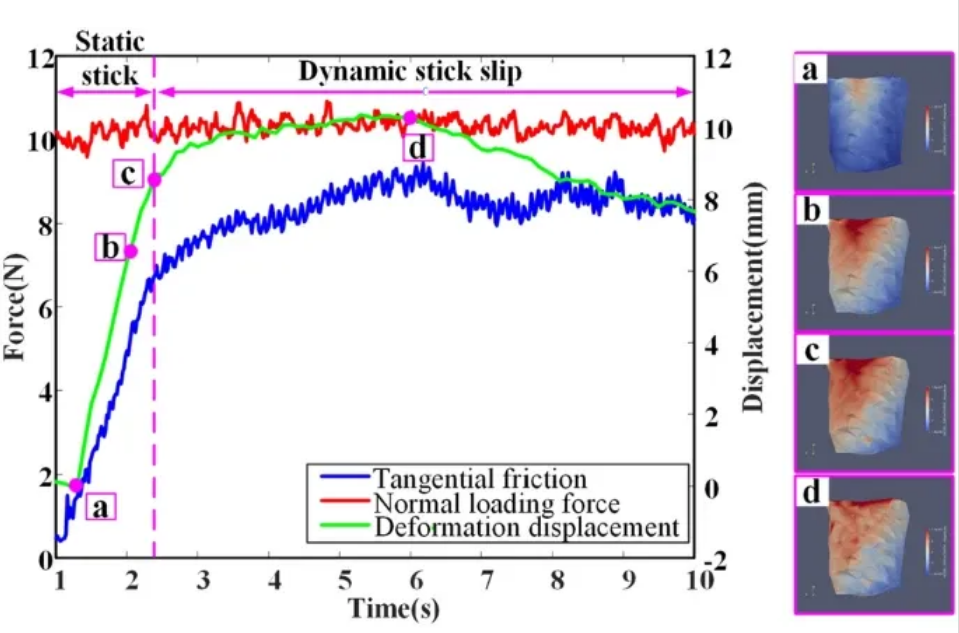
Fig. W3 The data during sliding and skin surface stretching deformation field (tester No. 3, V=10 mm and W=10N).
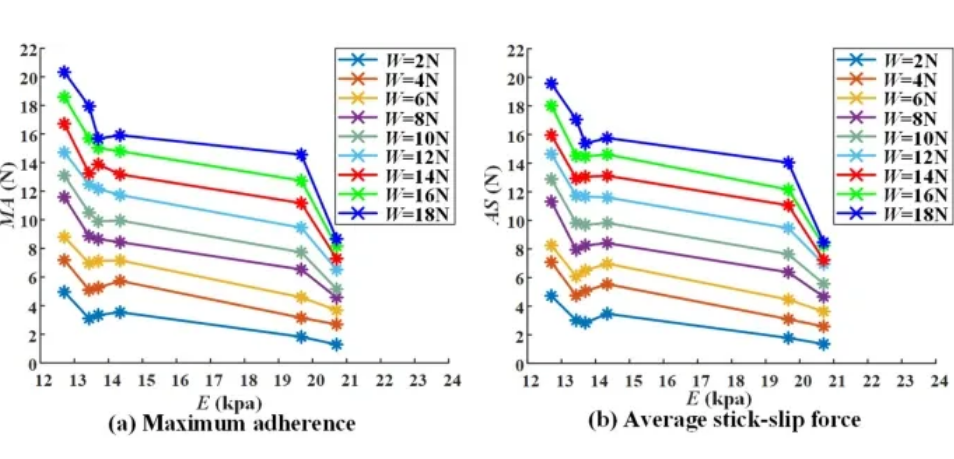
Fig. W4 Effect of elastic modulus on friction in two stages (V=10 mm/s).
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。
Information Publisher: Jingmei Zhai, Rixing Li & Ziqing Su
Information Release Unit: School of Mechanical and Automotive Engineering, South China University of Technology
Information Source: https://rdcu.be/dODup
