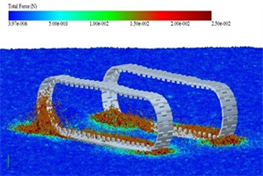
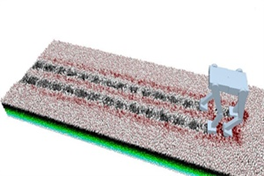
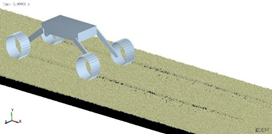
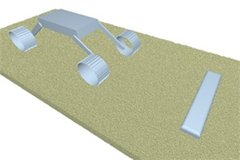
Through the establishment of soil bed in DEM and rigid body dynamics model in MBD, the coupling simulation of wheels, tracks and quadruped robots with different soil environment can be carried out. Different soil beds can be built on DEM according to the requirement, including but not limited to desert, hard ground, paddy field, etc. At the same time, different motion parameters of wheels, tracks and quadruped robots can be set in MBD to simulate the motion situation under different conditions. DEM-MBD Coupling Simulation Experiment can simulate the movement as well as the force acting on wheels, tracks, and quadruped robots under specific working conditions to the greatest extent. Compared with the single simulation experiment, the required data can be obtained more accurately then analyzed and processed.