国际仿生科技平台

在交通运输中,暴力碰撞会对乘客造成伤害。为了更好地保护乘客,提高车辆的防护性能,越来越多具有优良功能性能的防护结构被设计出来。在仿生保护结构中,蜂窝结构和手性结构得到了广泛的研究。手性蜂窝阵列结构在一定尺寸下具有极佳的力学性能。在结构设计中,可以结合防护设计的优化算法得到最优尺寸模型。
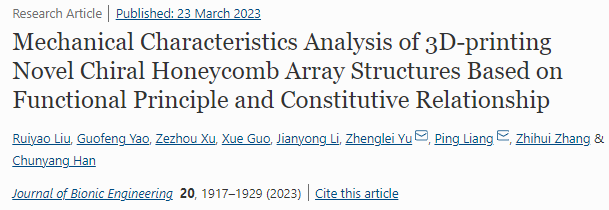
吉林大学张志辉教授的研究团队在Journal of Bionic Engineering上发表题MechanicalCharacteristics Analysisof 3D-printing Novel Chiral Honeycomb ArrayStructures Based on Functional Principle and Constitutive Relationship的学术论文,受生物排列形状启发,设计了四种新型手性蜂窝结构,揭示了解决仿生结构大变形问题的功能原理,提出了解释手性蜂窝阵列结构和蜂窝结构准静态力学性能的结构本构模型。通过仿真和实验结果验证了理论分析结果的准确性,误差均在15%以内。在结构力学性能方面,等维手性蜂窝阵列结构(ECHS)具有优异的力学性能。在ECHS中,小尺寸柱状手性蜂窝阵列结构(SCHCS)的性能最好,其承载力、比能量吸收、比强度均是本文常用结构的2倍以上。以椰树树枝的梯度排列和柱状排列为灵感,进行了不同类型的结构设计。每个仿生结构都显示在右边的放大的组成细胞中。结构尺寸如图1所示。
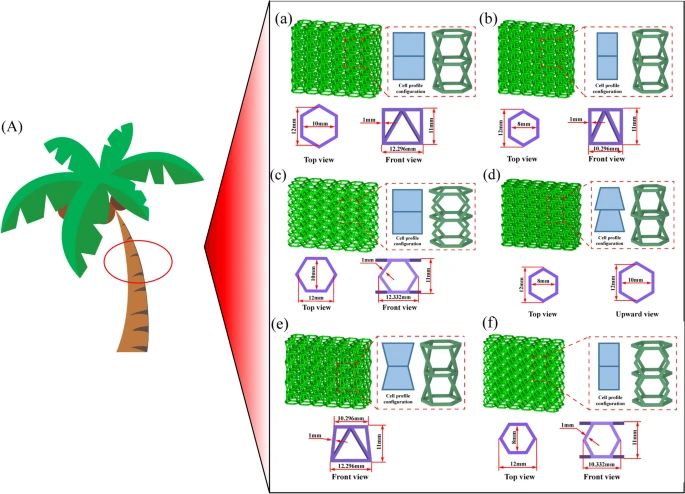
图1仿生结构和特征:(A)一棵层层叠叠的椰子树.(a) LCHCS. (b) SCHCS. (c) BHS. (d) GHCS. (e) HHCS. (f) SHS.
本文根据生物排列形状,参照了两种蜂窝结构:大蜂窝结构(BHS),小蜂窝结构(SHS),设计了四种仿生手性蜂窝结构:大柱蜂窝手性结构(LCHCS)、小柱蜂窝手性结构(SCHCS)、梯度蜂窝手性结构(GHCS)和沙漏蜂窝手性结构(HHCS),如图1所示。以仿生蜂窝结构为参照,比较新型仿生结构的优良特性,并以相似的方式排列和比较蜂窝结构。生物激发细胞由光束组成。其中,光束的厚度为t, t=1, nx=6,ny=3, nz=3在x, y, z方向的单元也是为细胞单元。梯度差取决于顶部蜂窝和底部蜂窝的大小。仿生结构在本文中是通过前到前、前到后的连续交叉来组装的,然后将六种细胞组合在一起,得到六种仿生结构。由于仿生结构的复杂性,本文选用尼龙材料,采用3d打印技术制造仿生优化结构。
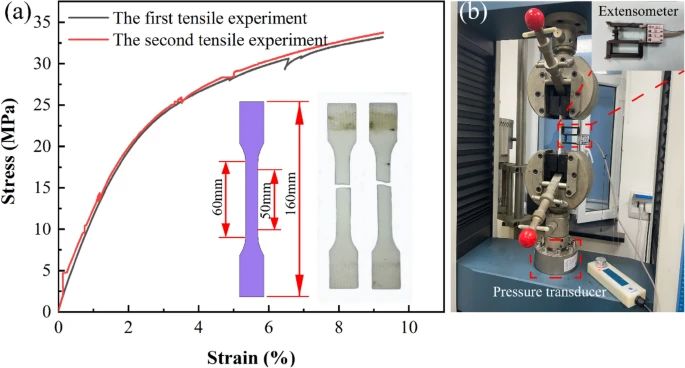
图2材料测试样品的材料性能。(a)尼龙试样拉伸实验结果。50mm为拉伸试样原规长,60mm为拉伸试样平行长度。(b)拉伸实验平台
在使用LS-DYNA进行仿真分析时,准确的材料性能设置可以大大提高仿真分析的精度。由于#24材质卡可直接输入材料拉伸曲线进行仿真,本研究采用#24材质卡进行仿真,直接导入尼龙拉伸性能曲线。尼龙材料的密度为1.1×10−10 kg/m3,尼龙材料的泊松比为0.34,尼龙材料的弹性模量为1000 MPa。在DDL100试验机上进行了常温拉伸试验,抗拉实验以2mm /min的拉伸速率进行,如图2所示。
图3 结构收敛性检验。由于GHCS和HHCS单元格是相同的,因此使用一条曲线来测试两个单元格的收敛性。
在本文中,LS-DYNA用于分析仿生结构。仿生结构的底部完全受限。仿生结构和刚性壁设置为#Surface到表面接触,以避免组件之间的压缩渗透。采用#Single Surface Contact算法模拟自接触过程。为了更好地模拟准静态压缩的真实过程,设置界面摩擦系数为0.2。在直角坐标系下,将仿生模型划分为三维四面体单元来模拟仿生结构。为了确定结构划分网格的合适尺寸,进行了收敛性试验。当仿生细胞被压缩12mm时,具有不同尺寸网格的仿生结构的整体吸收能量如图3所示。由图3可知,模拟元件的尺寸被限制在0.5 mm。同样,利用拉伸试验机对仿生结构在准静态载荷下进行单轴压缩。所有实验均以恒定的1.5 mm/min变形速率进行。在相同条件下,对每个手性蜂窝结构进行重复实验,避免意外结果。
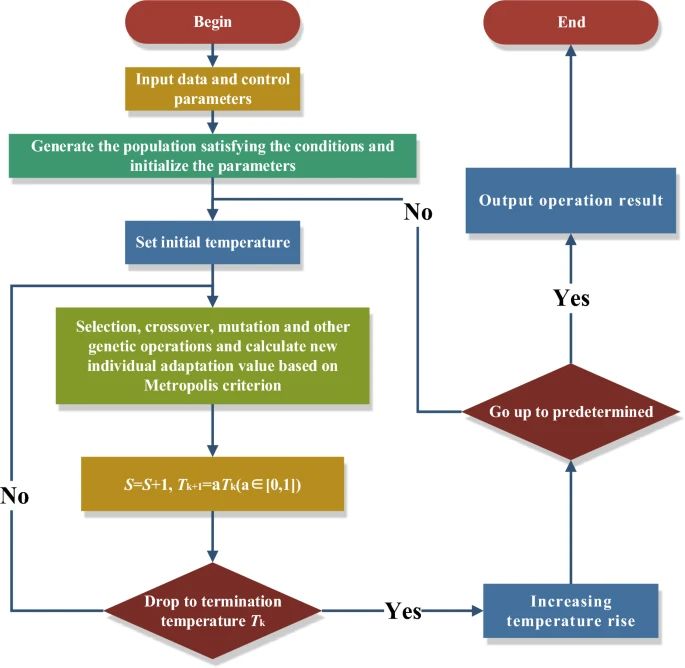
图4 改进的全局模拟退火(SA)算法过程在算法中,温度为参数集,初始温度为初始参数集。
根据压缩实验得到的力-位移数据,采用改进的全局模拟退火算法进行参数辨识,具体过程如图4所示。迭代重复次数为400,控制迭代次数为300。同时考虑了SEA和CFE参数的影响。仿生结构的力学性能如图5所示。
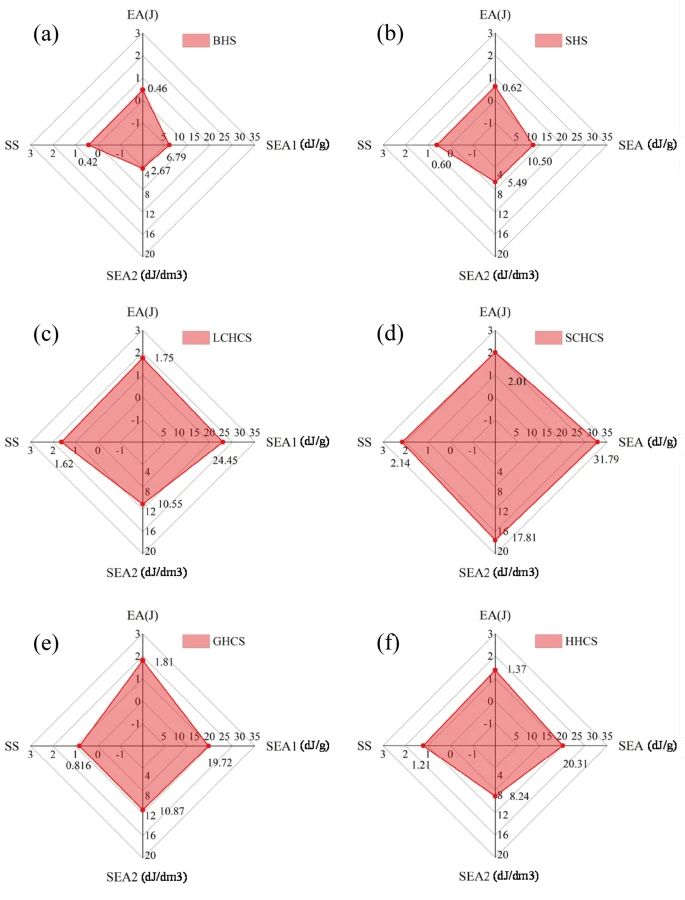
图5 仿生结构的力学特性。(a) BHS属性雷达图。(b) SHS特性雷达图。(c)LCHCS性能雷达图。(d) SCHCS特性雷达图。(e) GHCS特性雷达图。(f) HHCS性能雷达图
从图5 a-f可以看出,仿生结构的整体综合特性中,ECHS是最好的,即LCHCS和SCHCS的力学性能最好。而LCHCS则表现出稳定的受力和较大的破坏稳定性。同时,SS, SEA和EA都很棒。竹节等宽的手性蜂窝结构具有优异的力学性能表现,优于其他仿生结构。对比现有文献中高分子材料的结构压缩性能,如图6所示。
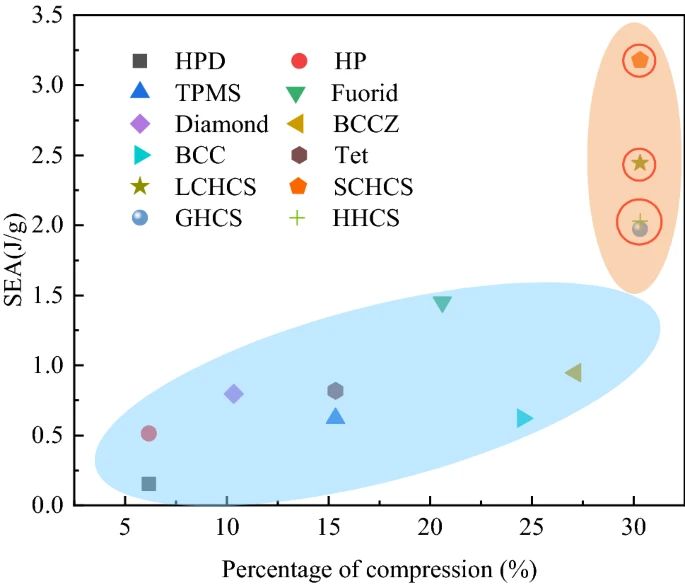
图6结构的SEA对比。本文用红色圈出的点是四个手性蜂窝状结构。
从图6可以看出,设计的手性蜂窝结构具有良好的吸能性能。仿生结构在压缩过程中,桁架之间的塑性铰特性导致应力集中现象,从而导致结构损伤。
图7不同尺寸下ECHS、GHCS和HHCS的F和EA。(a) ECHS的尺寸变化性能。(b) GHCS的尺寸变化性能。(c) HHCS的尺寸变化性能。
为了进一步探讨结构尺寸的影响,将六边形尺寸减小后的仿生结构的力学性能进行了比较。ECHS、GHCS和HHCS在不同尺寸下的承载力和能量吸收如图7所示。当胞格尺寸减小到4 mm时,ECHS、GHCS和HHCS的EA基本达到最大值,但最大承载能力F仍随胞格尺寸减小而增大。仿生结构的机械性能很大程度上取决于尺寸的选择。在仿生结构的优化设计中,小尺寸的选择是非常重要的。
结论:本文利用3D打印技术制造了四种受生物排列形状启发的手性蜂窝结构。提出了求解大变形响应的功能原理,并用结构本构关系解释结构力学性能。与试验结果相比,基于泛函理论和本构关系建立的力学模型精度较高,误差均在15%以内。ECHS的力学性能最好,其中SCHCS的力学性能最好。SCHCS具有最优异的F、SEA、EA和SS性能。数值模型验证了ECHS、GHCS和HHCS的承载力随尺寸的减小而增大。仿生结构的吸能随尺寸的减小先增大后保持不变。
以上文章转载于微信公众号国际仿生工程学会,如遇侵权,请及时联系我们修改或进行删除。