国际仿生科技平台

人手具有一系列令人印象深刻的功能,包括抓握和熟练操作、社交接触和非语言交流、艺术表达以及触觉探索。因此,失去一只手会深刻影响截肢者的生活。
在理想情况下,缺失的肢体将被仿生假肢所取代,其形状、大小和结构与生物假肢相同,并且与用户的感觉运动系统直接相连。这种连接将允许运动命令从用户无缝流向他们的仿生肢体,而来自肢体的传感器信号将被反馈给用户并转化为自然感觉。尽管已经出现了具有可单独控制和感应手指的机电一体化先进假肢,但如何有效地将这些复杂的系统与人体连接起来仍然是一个挑战。
为了设计仿生肢体和用户之间的双向接口,研究人员需要在人机接口(HMI)管道的每个阶段做出关键决策,如图1所示。Ortiz-Catalan等人展示了如何使用外科手术和神经工程技术的特定组合来开发一个完全独立的系统,用于双手假肢的双向控制。该系统能够灵巧地运动并恢复缺失的感觉反馈,这对患者的生活质量产生了显著影响。
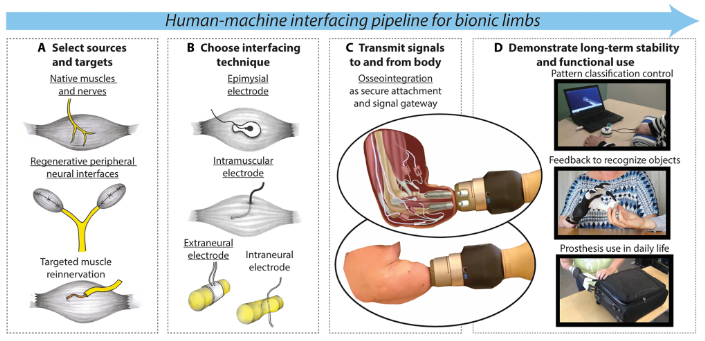
图 1.用于仿生肢体的 HMI 管道。(A) 选择可以作为控制信号源或反馈目标的生物结构,例如,天然肌肉和神经、再生周围神经接口或通过靶向肌肉再神经支配产生的源 。(B) 选择一种接口技术来记录信号或传递刺激。(C) 将信号从(记录)传输到(刺激)身体。(D) 证明系统稳定、可靠且功能有用。Ortiz-Catalan等使用指示的组件(带下划线的文本)开发了一个完全独立的系统,并演示了模式分类控制、感官反馈使用和长期日常生活应用。
HMI流程的第一步(图1A)是识别生物结构,这些结构可以产生用于假肢控制的命令信号或作为传递感觉反馈的刺激目标。传统上,控制信号是从剩余的天然肌肉记录的。然而,先进的假肢需要许多控制信号,而残肢中的肌肉数量可能非常有限。假肢HMI面临着一个独特的悖论:随着截肢程度的提高,替代失去功能所需的假肢变得更加复杂,可用于提供控制信号的肌肉越来越少。为了应对这一挑战,研究人员开发了一系列手术技术,以神经支配的自由肌移植物或血管化肌肉皮瓣的形式创建额外的信号源(小的“额外”肌肉)。其中一些生物结构也可以用作产生感觉的刺激目标,但更常见的方法是直接刺激感觉神经。
下一步(图1B)是选择一种记录信号(控制)或提供电刺激(反馈)的技术。刺激可以使用分别缠绕或刺穿神经的神经外电极和神经内电极传递到神经。可以使用放置在皮肤上的电极无创地记录信号,也可以通过缝合到肌肉表面(肌外膜)或插入肌肉体(肌内)的电极侵入性地记录信号。肌外膜电极提供机械稳定性,而肌内电极更小,选择性更强。
然后,需要将记录的数据从身体传输到假体控制器,反之亦然,以获得刺激信号(图1C)。可以使用穿过皮肤的电线建立这种连接。尽管这种方法的长期稳定性已得到证明,但该解决方案不适合家庭使用,因为经皮接口需要特别小心。信号也可以无线传输,但使用紧凑型电子设备通过机身无线有效地发送电力和数据仍然是一个挑战。在这里,骨整合提供了一个有吸引力的解决方案。在这种方法中,假体通过植入骨骼的钛固定装置牢固地固定在身体上。这种接口消除了使用传统假肢插座的需要,同时还提供了一个网关,可以安全地将电线布线到体外。
最后,即使在选择并实施了所有相关组件之后,该解决方案也需要证明其长期稳定性、功能使用潜力,以及理想情况下对日常生活质量的影响(图 1D)。Ortiz-Catalan等人开发了一种完全独立的系统实现,该系统已被患者使用了3年多,至今仍在使用。
他们使用天然肌肉和肌肉移植物的组合来产生总共11个控制信号来驱动假体,而尺神经则被选为感觉反馈的目标。他们使用更紧凑的肌内电极来记录来自小肌肉移植物的记录,并使用肌内电极和肌外膜电极来接收来自天然肌肉的信号,而引发触觉的刺激是使用神经外带电极传递的。通过骨集成接口实现双向信号传输。患者可以通过对记录的信号进行模式分类来控制粗略的手部和手腕运动以及虚拟假体的单个手指。植入后 123 周进行的电测试表明,控制信号质量稳定,在刺激下在幻影手中引发了可区分的触觉。临床试验证实,与“传统”表面电极相比,使用植入式表面电极的性能有了实质性的改善,问卷调查表明,由于每天使用骨整合假体,生活质量显著提高。
总的来说,这是一个激动人心的结果,可以改进身体和机器人肢体之间的接口。正如这些研究人员在他们的最新工作中所展示的那样,不仅发明了独特的外科手术,而且还成功地在同一残肢中结合了它们,并转化为临床上有用的解决方案。柔性和可拉伸电极以及微电子学的发展也很有希望。基于非侵入性技术的先进解决方案也不应被忽视,因为它们可能更容易采用并转化为日常生活(无需手术)。总之,这些发展创造了一个强大而紧凑的双向接口的愿景,最终可以在用户和他们的仿生肢体之间实现高带宽通信。尽管我们离完整神经系统的复杂性和信息吞吐量还很远,但我们正在稳步接近仿生替代的“圣杯”——一种灵巧的假肢,具有直观、同步和毫不费力的控制以及自然的、空间分布的体感反馈。
以上文章转载于微信公众号CAAI认知系统与信息处理专委会,如有侵权,请及时联系我们修改或进行删除。