国际仿生科技平台

近日,华南理工大学吴贤铭智能工程学院钟勇团队在期刊《IEEE Transactions on Robotics》上以Regular Paper形式发表了最新研究成果“A General Kinematic Model of Fish Locomotion Enables Robot Fish to Master Multiple Swimming Motions”。该研究构建了一个能描述鱼类多种步态的运动学模型,并基于该模型提出了一种实现并优化仿生机器鱼多模态运动的方法。该工作能为仿生机器鱼的设计与控制及机器鱼领域的流体力学研究提供新的思路。
论文作者包括华南理工大学的钟勇教授、博士研究生洪梓村、硕士研究生李雨寒和北京大学的喻俊志教授。华南理工大学为该研究的第一单位,北京大学为合作单位。

研究背景
鱼类在水中的游动非常灵活,其中采用身体和/或尾鳍推进(BCF)的鱼具有非常多样的运动模型,如巡航直游(直线稳态游动)、巡航转弯(以恒定的线速度进行低角速度的转弯)和各种快速转弯(C形转弯和S形转弯等,即身体弯曲成相应的形态)。目前仿生机器鱼的设计和控制是以模拟鱼游动的身体曲线为目标的,大部分以行波方程曲线作为设计和控制模仿的参考。而行波只能描述鱼类巡航直游的状态,在描述鱼类的转弯运动时,往往采用身体曲率作为变化量的模型,但大部分只集中在C形转弯方面,且各模型之间形态各异。这导致在控制仿生机器鱼进行多模态游动时,每一种游动模态需要对应不同的运动学方程,这样会增加仿生机器鱼多游动模态的运动控制难度并影响控制精度。此外在使用CFD对鱼类运动进行分析时,难以获取鱼类不同步态的身体中线是限制研究效率提升的瓶颈。因此构建一种能描述鱼类多种运动步态的统一运动学模型是进一步增加仿生机器鱼步态多样性的关键,同时也能为鱼类运动在流体力学方面的研究提供简便的工具。
多模态统一运动学模型
行波是由波幅包络函数和正弦函数组成,鱼类多游动模态下的身体曲线与行波相比存在着波幅和波形两方面的不同。而非线性信号发生器是一类能够产生多种非标准正弦信号的模型,可以通过调节参数、以及相位函数和输出函数的形式来实现。本文以描述鱼类巡航直游的行波方程作为基础,结合非线性振荡器,巧妙地构建了一种能描述鱼类多种运动步态的统一运动学模型(图1)。对模型进行定量分析后,可发现表征幅值、偏置量、摆动时间比和体波数等属性的参数对模型的形态起着决定性作用。通过对参数的合理调节,该统一运动学模型能在巡航直游、巡航转弯、C形转弯、S形转弯、小半径转弯等鱼类运动步态之间切换(图2)。
图1 多模态统一运动学模型的构成
图2 不同步态的展示
动力学及计算流体力学仿真验证
为了验证多模态统一运动学的有效性,建立了水下多关节机器鱼的动力学模型,并通过PD控制器计算模型中各关节的输入,让其以统一运动学的形态进行游动,从而实现不同模态的动力学仿真(图3),结果表明不同的运动学模态对应着不同的运动轨迹和游动姿态。通过将多模态统一运动学模型与机器鱼动力学模型相结合,即可得到一套能够高效分析机器鱼步态的方法。此外针对不同步态的切换,基于浸没边界法-有限差分法进行了计算流体力学(CFD)分析(图4),仿真中机器鱼顺滑地从巡航直游过渡到S形转弯,整个运动过程的水动力细节都能被获取,这为深入研究鱼类步态转换过程中的流体力学特性提供了便利。
图3 不同步态下的多关节机器鱼动力学仿真
图4 巡航直游向S形转弯切换的计算流体力学仿真
机器鱼的多步态控制
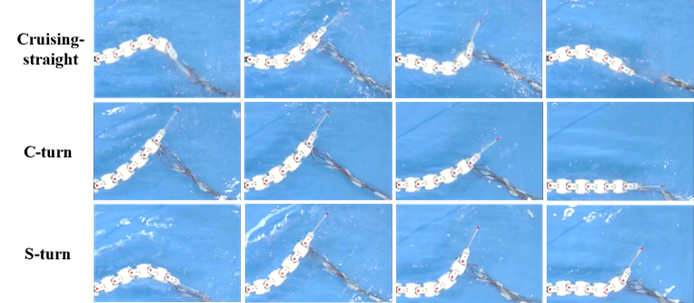
在进行仿生机器鱼的多步态控制算法设计时,以构建的多模态统一运动学模型作为理论指导,基于体波拟合法对模型进行步进离散,即可快速得到机器鱼在不同步态下的驱动输出。为了对算法进行验证,搭建了一个具备五个驱动关节的机器鱼平台,并分别将其头部固定进行步态观测以及自由游动实验,结果表明机器鱼成功实现了不同步态的运动,且运动趋势与仿真结果相似(图5,图6)。
图5 机器鱼的不同步态
图6 机器鱼不同步态的游动效果
结论
本文提出了一种能够描述鱼类不同步态的统一运动学模型。该模型不仅能降低机器鱼多步态控制的难度并提高控制的精度,还能帮助生物学家和计算流体力学专家低成本地研究鱼类不同运动的内在特性。结合该多模态统一运动学和文中所构建的动力学模型及控制算法,提供了一套水下仿生机器鱼的设计指导框架。
在未来的工作中,通过对模型中各参数进一步的分析和修改,将有可能创造出更多有趣的(包括现有鱼类不具备的)步态,为机器鱼的设计提供更多可能性。除了机器鱼领域,该模型还能模仿蛇等生物的运动,这将为各类节律性运动的仿生机器人的设计与控制提供帮助。
该工作得到了国家自然科学基金、广东省自然科学基金和广州开发区国际合作等项目的支持。
以上文章转载于微信公众号机器人大讲堂,如有侵权,请及时联系我们修改或进行删除。