国际仿生科技平台

吉林大学数控装备可靠性教育部重点实验室黄虎教授的研究团队在Journal of Bionic Engineering上发表题为A Bionic Stick–Slip Piezo Driven Positioning Platform Designed by Imitating the Structure and Movement of the Crab的学术论文,通过模拟蟹的横向运动,提出了一种粘滑直线压电驱动定位平台。
讨论了仿生柔性铰链机构的结构设计和仿生运动原理,通过刚度矩阵法和有限元仿真分析了仿生柔性铰链机构的可行性、安全性和输出放大比。为了研究该定位平台的输出性能,制作了样机并建立了实验系统。对定位平台在不同驱动电压下的步进特性进行了表征,结果表明定位平台在不同驱动电压下均能稳定移动。在1 s内,在不同驱动频率下,正反向输出位移的差异小于3%,证明了高双向运动对称性。当驱动电压为120 V,驱动频率为5 Hz时,其最大驱动速度为5.44 mm/s。此外,通过标准砝码测试了定位平台的承载能力,结果表明,当承载载荷达到10 N时,其行驶速度仍可达到60 μm/s。
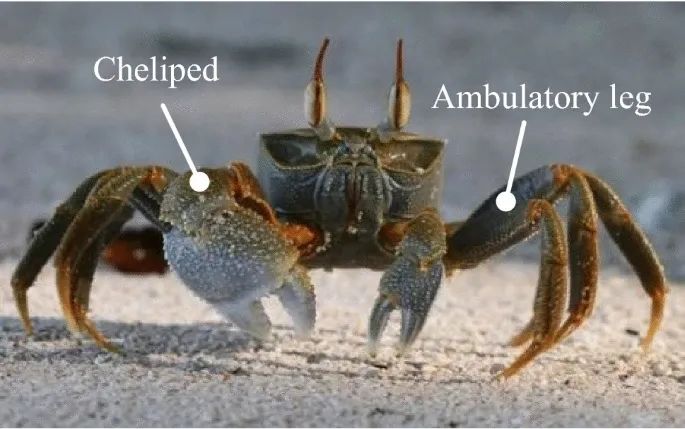
图1 蟹的身体结构
如图1所示,自然界的螃蟹有五对足,包括一对蹄足和四对活动腿。众所周知,螃蟹可以通过横向运动快速而稳定地移动,这与其他生物不同。螃蟹的横向运动是通过四对活动腿的合作来实现的。通过对一对活动腿的运动进行分析,可以将整个运动过程分为三个阶段:推动阶段、伸展阶段和收缩阶段,如图2所示。该运动的关键阶段是推动阶段。在这个阶段,活动腿产生了很大的驱动力,同时实现了很大的横向运动。因此,为了有效提高定位平台的步进位移和双向运动对称性,通过模仿蟹的结构和横向运动来设计驱动机构。
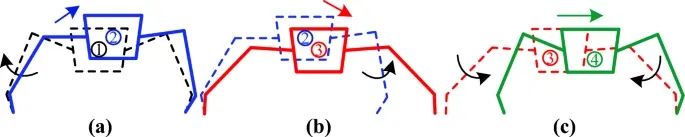
图2 蟹的运动原理: (a)推动阶段;(b)延伸阶段;(c)缩回阶段
根据螃蟹的身体结构,设计了一种新颖的粘滑定位平台。定位平台由柔性铰链机构、压电堆栈(PES)、微调机构、滑块(移动器)、导轨和连接板组成。整体结构如图 3 所示。
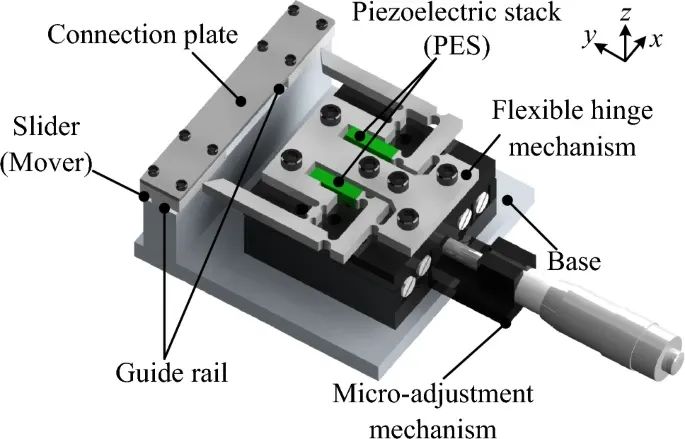
图3 定位平台结构示意图
柔性铰链机构通过螺钉完全固定在微调机构的上表面,作为驱动源的 PES 安装在输入端。定位平台的工作平面由两个移动器和一个连接平台构成,移动器可做直线运动,阻力较小。微调机构通过控制柔性铰链机构与移动器之间的初始接触间隙,使定位平台达到最佳工作状态。柔性铰链机构由两个多级杠杆放大结构组成,可以放大 PES 的微小位移,从而获得较大的最大步进位移。柔性铰链机构的整体尺寸为 78 mm × 78 mm × 5 mm,柔性铰链机构的制造材料为 7075 铝合金。其弹性模量、泊松比和密度分别为 71.7 GPa、0.33 和 2.81 g/cm3。详细的结构参数如图 4 所示。
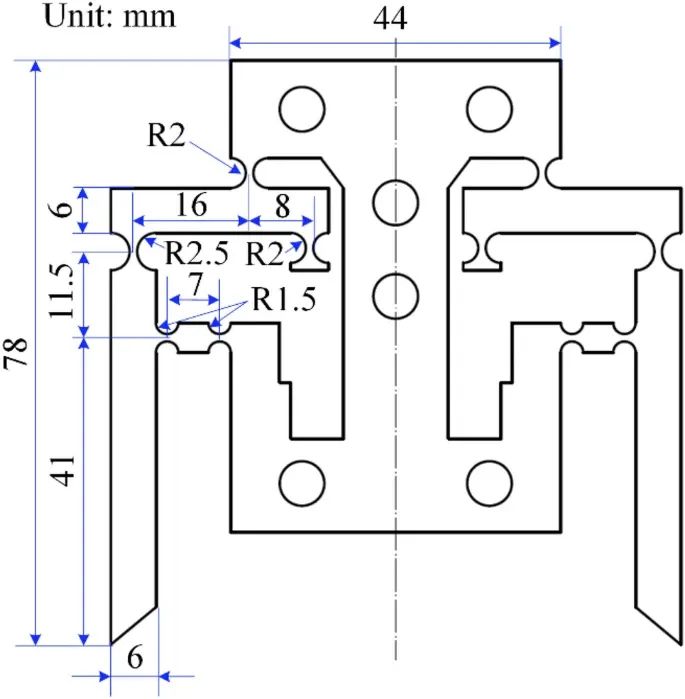
图4 柔性铰链机构的结构参数
螃蟹在自然界中产生横向运动的关键阶段是推动阶段,如图2(a)所示。因此,驱动机构的运动原理主要模仿螃蟹运动的推动阶段。为了实现这一仿生运动过程,采用锯齿波作为驱动电压。定位平台的仿生运动过程如图5所示,其描述如下:
第一阶段:此时PESs不加驱动电压,柔性铰链机构调整到适当位置。定位平台处于静止状态。
第二阶段:在t1时刻,对PES施加缓慢升高的驱动电压,PES的持续伸长产生柔性铰链机构的变形,如图5(b)所示。此时,可将柔性铰链机构的输出部分视为蟹的活动腿。在对动器施加正压的同时,将动器沿驱动方向缓慢推进,直到时间t2,即驱动电压达到最大值。在此过程中,动器的移动位移为定位平台的最大步进位移S。这一阶段相当于螃蟹运动的推动阶段和伸展阶段的结合,如图2(a)和图2(b)所示。
第三阶段:在图 5c 中,当驱动电压在 t2 时达到最大值后,会迅速下降到零。此时,PES 将恢复到初始长度,柔性铰链机构也将在弹性力的作用下迅速恢复到初始状态。此外,在摩擦力的作用下,运动者会产生向后运动,向后位移为 S0。如图 2(c) 所示,这一阶段可视为蟹运动的缩回阶段。在整个运动过程中,原动机在驱动方向上的位移为 ΔS,即定位平台在一个驱动电压周期内的有效步进位移。
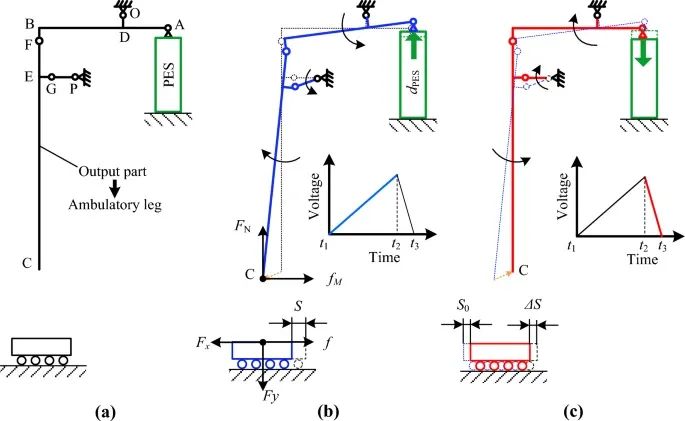
图5 柔性铰链机构的仿生运动原理:(a)定位平台的初始状态;(b)移动机构由柔性铰链机构推动;(c)柔性铰链机构迅速恢复到初始状态
根据上述仿生运动原理,柔性铰链机构将决定定位平台的最大步进位移、分辨率和放大倍率,是实现定位平台驱动的关键。为了验证仿生设计的可行性,采用柔性矩阵法(FMM)和有限元仿真法(FES),并对计算结果进行了对比分析。为了进一步验证理论计算的准确性和仿生柔性铰链机构在驱动过程中的安全性,采用 ANSYS Workbench 有限元仿真软件对其运动进行了仿真。首先,柔性铰链机构的制造材料为 7075 铝合金,并采用相应的材料参数。然后,采用六面体结构对模型进行精确网格划分。然后,对柔性铰链机构的螺栓连接孔壁施加固定约束,对输入端施加 dPES = 14 μm 的位移约束。如图 6 所示,应力主要集中在柔性铰链机构的每个右圆柔性铰链上。最大应力约为 49.17 MPa,远小于 7075 Al 的容许应力。此外,还可以发现输入端的柔性梁上也存在较大的应力,这也表明柔性梁在运行过程中会产生弯曲变形。
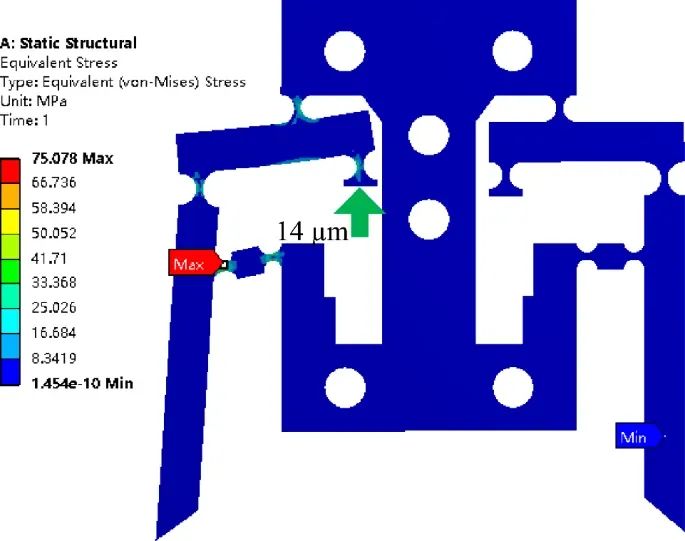
图6 FES应力分析结果
图7 进一步分析了机构的变形状态。在图 8(a) 中,当输入位移为 14 μm 时,在驱动方向上会产生 27.47 μm 的输出位移。因此,通过有限元模拟得到的驱动放大比 η 约为 1.96。此外,输出端在垂直于移动器表面方向上的位移约为 12.63 μm。有限元模拟结果还表明,柔性铰链机构可有效放大输入位移。理论计算结果和仿真结果与 14 μm 的输入位移进行了比较。SMM 的结果与 FES 的结果非常接近,差异仅约为 0.41%。此外,还通过有限元模拟进一步对柔性铰链机构进行了模态分析,其一阶和二阶共振频率分别约为 1078 Hz 和 1080 Hz。
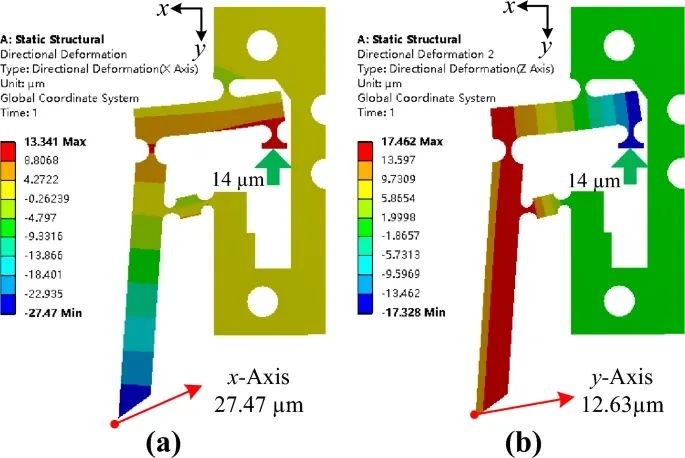
图7 输入位移为14 μm的柔性铰链机构FES结果:(a)沿驱动方向变形;(b)沿垂直于动器表面方向变形
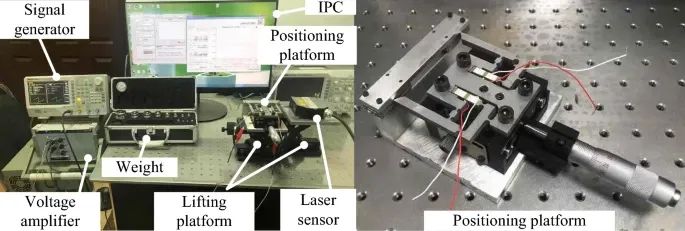
为测试定位平台的输出性能,制造了一台原型机并建立了实验系统,如图 8 所示。实验使用锯齿波作为输入信号,该信号由信号发生器(DG4062,中国普源精电科技有限公司)产生,并由电压放大器(E01.A3,中国哈尔滨芯明天科技有限公司)放大。为精确测量定位平台的输出位移,将原型机和激光位移传感器(ILD2300-2,德国 Micro-Epsilon)分别放置在两个升降平台上,以调整相对位置。激光位移传感器采集移动装置的位移,并将数据传输到工业个人计算机(IPC)进行记录。此外,还在定位平台的连接板上放置了标准砝码,以测试垂直负载能力。为防止环境振动影响测试结果,所有实验均在隔振平台上进行。
在探索定位平台的输出性能之前,先测量了柔性铰链机构的谐振频率。采用电压为 10 V、频率范围为 1 ~ 2000 Hz 的扫频信号,频率上升速率为 1000 Hz/s。采集并记录了柔性铰链机构两个输出端在驱动方向上的位移。结果如图 9 所示。两只脚的一阶共振频率分别为 1167 Hz 和 1176 Hz,与 FES 得出的结果十分吻合。这表明仿生柔性铰链机构可以在相对较宽的频带内工作。
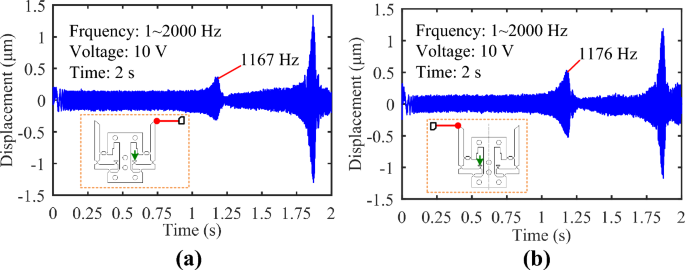
图9 扫频法测得的输出位移曲线:(a)为右输出端;(b)为左输出端
结论:为了满足大行程、强承载能力和良好双向运动对称性的要求,本文提出了一种基于粘滑原理和仿生概念的新型定位平台。通过模仿自然界中螃蟹的身体结构和运动方式,设计了具有对称结构的仿生螃蟹柔性铰链机构。本文详细讨论了其工作原理和仿生运动过程。采用刚度矩阵法和有限元法计算了柔性铰链机构在驱动方向上的输出放大比,并分别对计算结果进行了比较和讨论。为获得定位平台的输出性能,制造了原型并建立了实验系统。实验测试了定位平台的输出性能。结果表明,定位平台能在各种驱动电压下实现稳定驱动。此外,在 120 V 的驱动电压下,1 s 内的正反转输出差值基本不超过 3%。在 120 V、350 Hz 的驱动电压下,定位平台的最大速度可达 5.44 mm/s。此外,还测试了承载能力。结果表明,当负载为 10 N 时,在 120 V、5 Hz 的驱动电压下,驱动速度仍能达到 60 μm/s,这表明定位平台具有良好的承载能力。凭借这些特性,它有望应用于材料的机械测试仪器,如微/纳米划痕和压痕测试仪器。
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。