国际仿生科技平台

许多软体爬行动物采用蠕动的方式进行运动。蠕动,即肌肉交替收缩和松弛,沿着柔软的圆管传递的过程,而蚯蚓恰好是采用蠕动运动的典型的软体环节动物。当蚯蚓向前爬行时,体节的纵肌收缩,环肌舒张,该节长度缩小,体腔内体液不会随意流动,因此体腔压力升高,其身体表面的刚毛伸展,使身体更好的锚定在基底上;而相邻体节组则纵向肌肉舒张,环肌收缩该节变长,体腔压力下降,刚毛回缩,蚯蚓将前端的体节伸展,这时后端的体节仍然保持膨胀锚定在基底上,并施加向后的推动力,从而将其自身推向前。
近日,来自北京化工大学的研究人员通过仿生蚯蚓的这种蠕动原理,利用光热驱动液晶弹性体驱动器制作了一种仿蚯蚓运动的软体机器人,该项研究以《Photothermal-Driven Crawlable Soft Robot with Bionic Earthworm-Like Bristle Structure》为题发表在Advanced Intelligent Systems期刊上。
研究人员通过设计不同数目的刚毛(PDMS材质),来使得仿蚯蚓机器人的前腿和后退的摩擦力不同。在光源的激励下这种摩擦力的差异将作为机器人的驱动力,使得机器人产生蠕动,但只能单向运动。
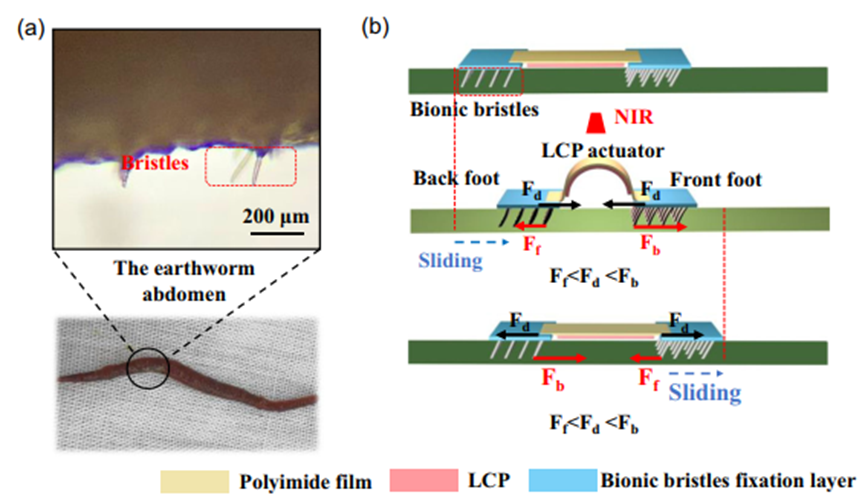
图1.仿蚯蚓软体机器人的工作原理。蚯蚓及其腹部刚毛。B)光热驱动下仿生刚毛柔性机器人运动原理示意图。
研究人员对仿生刚毛的倾斜角度和长度对于摩擦力的影响进行了研究,并且详细介绍了其制造过程。
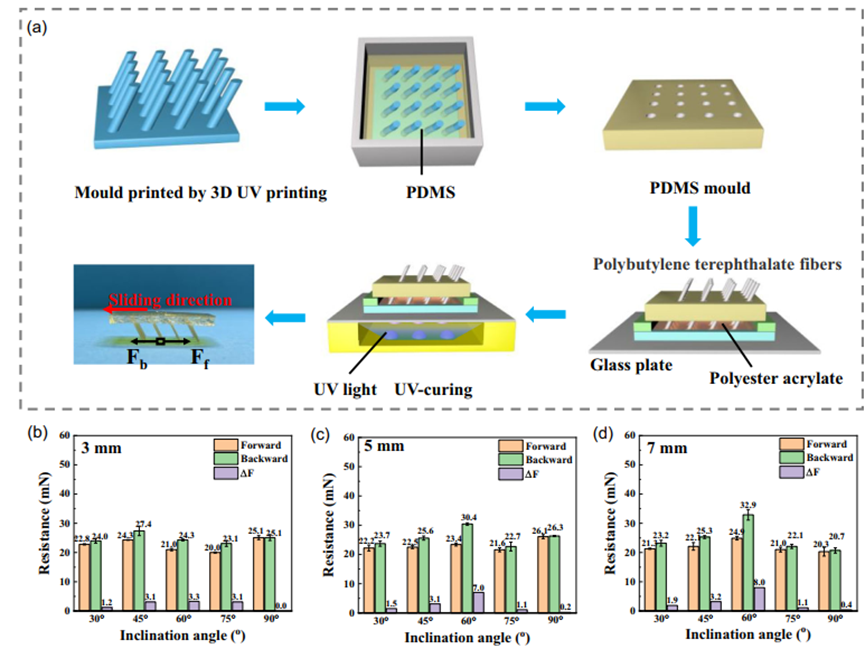
图 2. 仿生刚毛的制备和制造。A)仿生刚毛的制备步骤。B-D)不同倾角(30°,45°,60°,75°和90°)的仿生刚毛在纸面上滑动时的Ff,Fb和ΔF。仿生刚毛的长度分别为3、5和7毫米。
随后,研究人员对液晶弹性体驱动器的致动特性进行了实验测试,包括在不同光强下和不同温度下驱动器的输出特性。
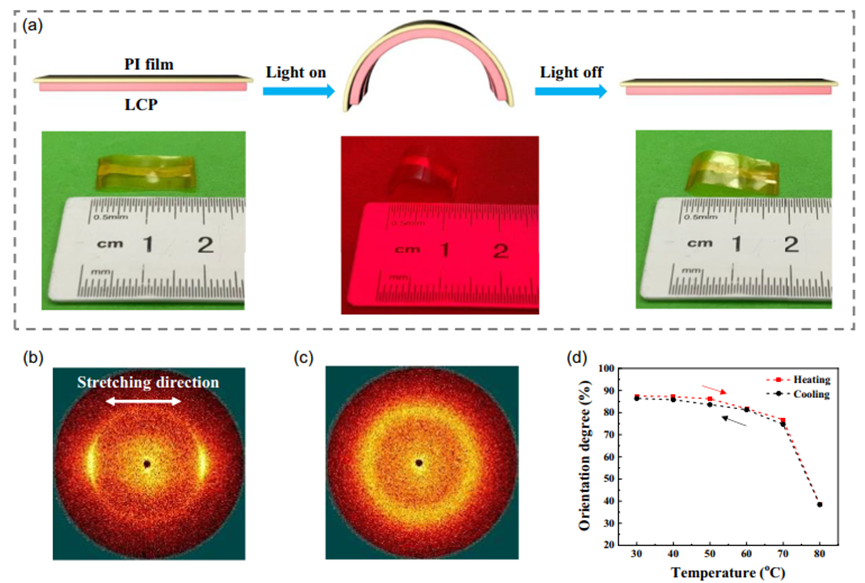
图 3.液晶弹性体驱动特性和仿生刚毛特性。A)显示可逆弯曲的液晶弹性体的示意图和照片。B)室温下液晶弹性体的二维 XRD 图形。C)80°C 下液晶弹性体的二维 X 射线衍射图。D)利用二维 X 射线衍射图谱计算了不同温度和取向度下液晶弹性体驱动器的取向。
为了充分说明仿生刚毛对于仿蚯蚓软体机器人的重要性,研究人员对无仿生刚毛的仿蚯蚓软体机器人进行了实验测试,发现其在近红外光下无法蠕动爬行。当给软体机器人装上了仿生刚毛后,在近红外光控制下,软体机器人成功实现爬行运动,机器人的平均前进速度可以达到1mm/min。
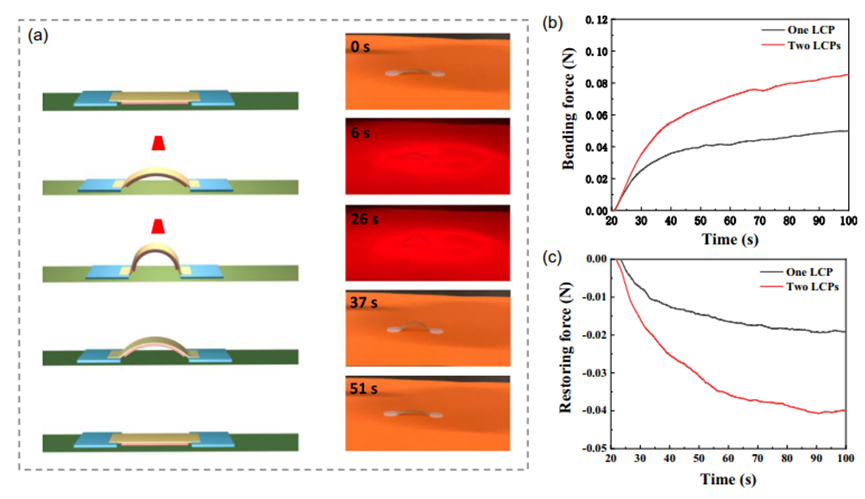
图4.近红外光下无法爬行的软体机器人,只是在原地伸展和收缩。没有仿生刚毛的软体机器人在近红外光下不能爬行。B)光热驱动液晶弹性体的弯曲力与不同量的液晶弹性体。C)恢复力光热驱动的液晶弹性体驱动器与不同数量的液晶弹性体。
研究人员发现可以通过改变照射距离和液晶弹性体驱动器长度来调节速度。首先,使用倾斜角为60°的5毫米仿生刚毛和2厘米长的液晶弹性体驱动器组成软体机器人。软体机器人的爬行速度由步频和步幅共同决定,在5cm照射距离下平均爬行速度可达3.3mm/min。
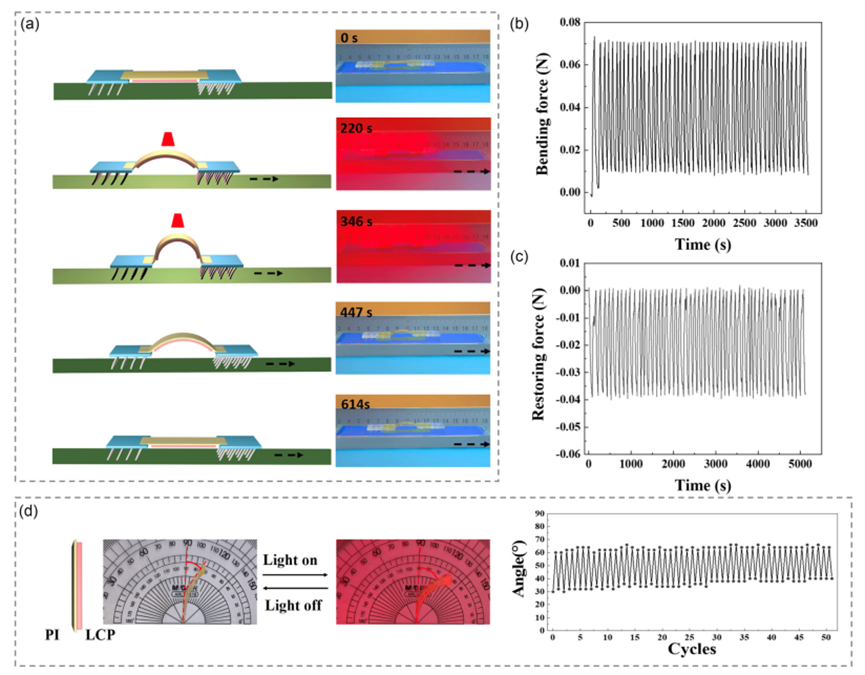
图5.基于近红外光控制的可爬行软体机器人。A)该软体机器人驱动单元的液晶控制点数目为2个,并且可以在近红外光下爬行。仿生刚毛的长度为5毫米。B)光热驱动液晶控制器的连续弯曲力。C)光热驱动液晶弹性体驱动器的连续恢复力。D)光热驱动液晶弹性体的弯曲角度和弯曲循环试验。
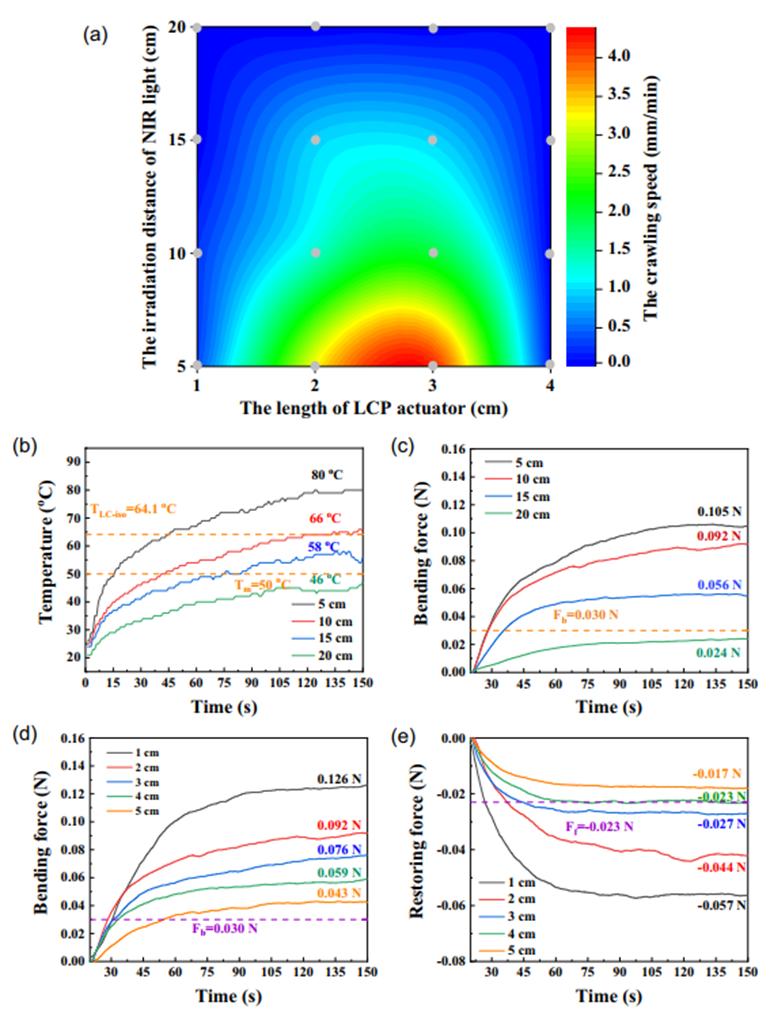
图6.通过改变近红外光照射距离和液晶弹性体驱动器的长度来调节机器人的爬行速度。A)实验结果表示使用不同几何组合的机器人。B)近红外光照射时的辐照温升曲线光照射距离分别为5、10、15和 20 cm(Tm 是晶体熔化温度,TLC-iso 是液晶各向同性转变温度)。C) 当近红外光照射距离为5、10、15和20 cm时,长度为2 cm的液晶弹性体驱动器的弯曲力。D)液晶弹性体的弯曲力,当近红外照射距离为10 cm时,不同长度为1、2、3、4和5 cm的驱动器。E)不同液晶弹性体驱动器的恢复力,当近红外光照射距离为10 cm 时,长度为1、2、3、4 和5cm。
研究人员通过仿生蚯蚓的生理结构提出了一种新的软体机器人驱动策略,即通过仿生刚毛结构和光热驱动的液晶弹性体驱动器实现无线软体机器人的爬行。通过控制仿生刚毛的结构参数和光照条件,研究人员可以改变机器人的运动特性。虽然运动速度较慢,但该研究凸显了仿生刚毛可以拓宽软体机器人驱动材料选择。
近年来,基于液晶弹性体驱动器的形变、变色和自修复行为已被广泛研究,使其在性能研究方面取得了巨大进展。然而,液晶弹性体驱动器的研究领域仍存在以下问题:(1)虽然已经设计和开发了许多液晶弹性体驱动器,但其中大多数只能执行一种或两种功能模式,因此,将多种功能模式(如可逆形变、连续运动、自修复和可回收等)整合到单一液晶弹性体驱动器体系中仍然是一个难题。(2)大多数LCE材料的聚合物链上通常会含有非生物相容性、不可降解的刚性芳香环基元,并且不能通过进一步交联来满足大多数生物软组织的力学性能要求,以上局限性极大地阻碍了其在机器人领域和其它生物医学方面的发展。可见,设计和制备具有良好生物相容性、生物降解性和可进一步交联的液晶聚合物材料仍然具有挑战性。
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。