国际仿生科技平台

背景介绍
大自然为软机器人的发展提供了大量灵感。许多生物,如人类的舌头、水母的触手和含羞草的叶子,不仅可以在长距离内灵活变形,而且具有自我感应能力。为了模拟这些自然系统,研究人员通过结合软致动器和柔性传感器开发了仿生软机器人。然而,一个普遍的限制是,大多数软致动器虽然能够形成复杂的形状,但缺乏感知外部刺激和监测自身运动的能力。作为一种补救措施,研究人员求助于嵌入传感器,导致软机器人设计和制造的复杂性增加。因此,软机器人在环境交互中的应用受到阻碍。鉴于这些挑战,开发仿生多功能自感软机器人已成为一个引人注目的相关研究方向。
刺激响应水凝胶作为一类新型智能软材料,在软机器人、传感器、人工肌肉和生物医学工程等领域引起了广泛关注。这些水凝胶可以通过响应外部环境刺激而灵活变形,如温度、近红外(NIR)光、pH、湿度和电场或磁场。在这些刺激中,近红外响应水凝胶致动器由于其优越的空间和时间分辨率而显得特别有前途。
最近,研究人员将光热可转换的导电聚合物或导电纳米颗粒引入水凝胶中,从而开发出既能进行近红外响应驱动又能进行导电传感的自感水凝胶致动器。例如,通过将导电聚合物聚苯胺(PANI)掺入双网络聚(N-异丙基丙烯酰胺-共丙烯酰胺)/聚乙烯醇(PNA/PVA)水凝胶中制备导电水凝胶。通过与被动聚丙烯酰胺(PAAM)层相结合,制备了双层自感知水凝胶致动器,其中电阻的变化允许实时感测致动状态。然而,这些双层水凝胶致动器表现出相对较差的致动速度和传感性能,并且在长期使用中容易分层。通过导电表面功能化MXene(K-MXene)/PEDOT:PSS油墨与热响应PNIPAM水凝胶的原位共聚,制备了均匀的体感水凝胶致动器,实现了快速、形状可编程的NIR响应致动和良好的自传感。然而,由于需要连续的刺激梯度,均质水凝胶致动器在长时间内保持对致动行为的精确控制方面提出了挑战。梯度水凝胶致动器因其在外部刺激下的集成、灵活控制和平滑连续变化而受到广泛研究。然而,基于梯度结构的自感知水凝胶致动器尚未开发出来。
值得注意的是,上述现有的自感知水凝胶致动器主要关注其传感行为,缺乏传感信息的量化,并且尚未实现软硬机器人交互。因此,迫切需要制备用于机器人远程交互的自感知梯度水凝胶致动器。
本文亮点
1. 本工作提出了一种新型的多功能自感驱动梯度水凝胶,它结合了超快驱动和高灵敏度,用于与机械手的远程交互。
2. 梯度网络结构是通过包括MoO2纳米片快速沉淀的润湿性差异方法实现的,在水凝胶的两侧之间引入了亲水性差异。这种独特的方法使水凝胶具有超快的热响应驱动(21°s−1)和增强的光热效率(在808 nm近红外下增加3.7°C s−1。
3. 水凝胶表现出高灵敏度(应变系数3.94,在600%的宽应变范围内)、快速响应时间(140 ms)和良好的循环稳定性。
4. 利用这些特殊特性,将水凝胶纳入各种软致动器中,包括软夹持器、人工虹膜和仿生水母,以及能够精确检测人体运动和生理信号的可穿戴电子设备。
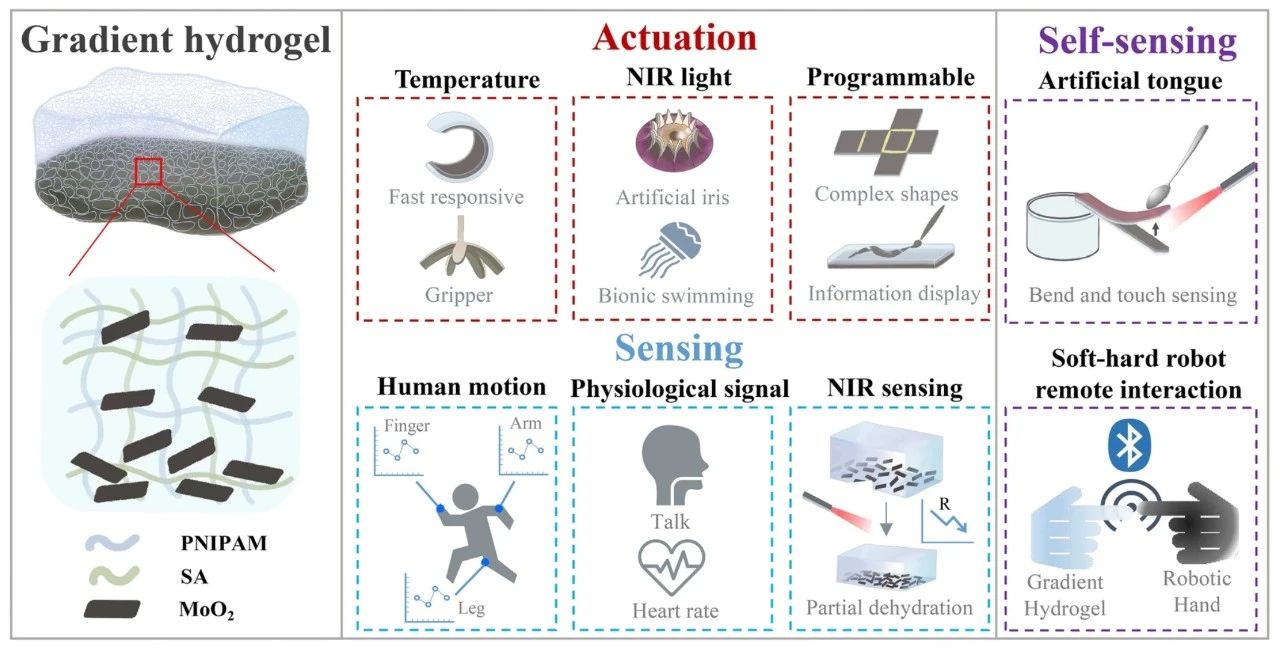
图1. 自感动梯度水凝胶的合成、性能和应用示意图。
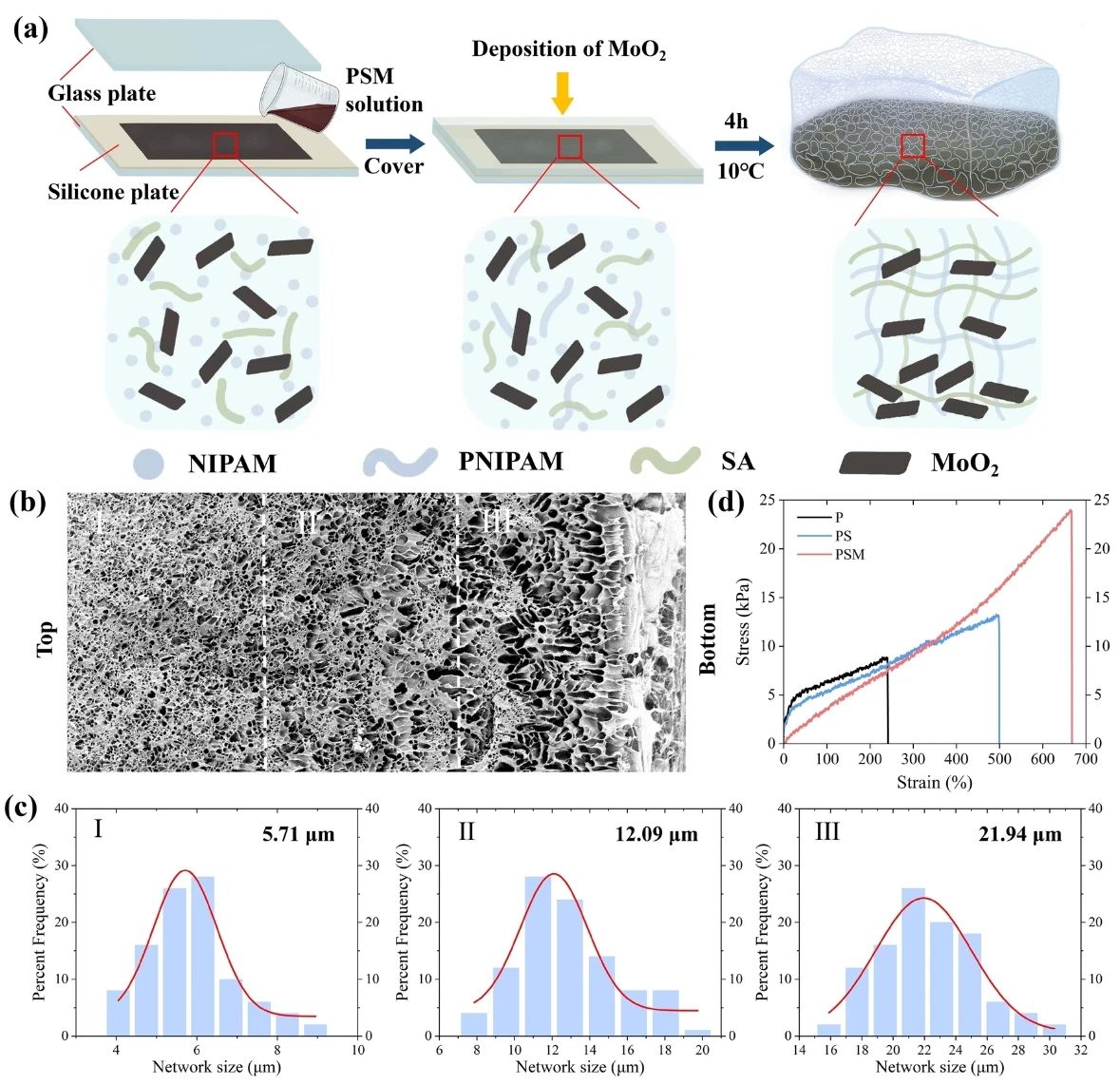
图2. PSM水凝胶的合成与表征。a PSM水凝胶的合成、聚合分散和梯度网络结构的示意图。b具有大范围梯度结构的PSM水凝胶的SEM图像。c PSM水凝胶在b.d中三个不同位置的网络尺寸统计。P、PS和PSM水凝胶的应力-应变曲线。
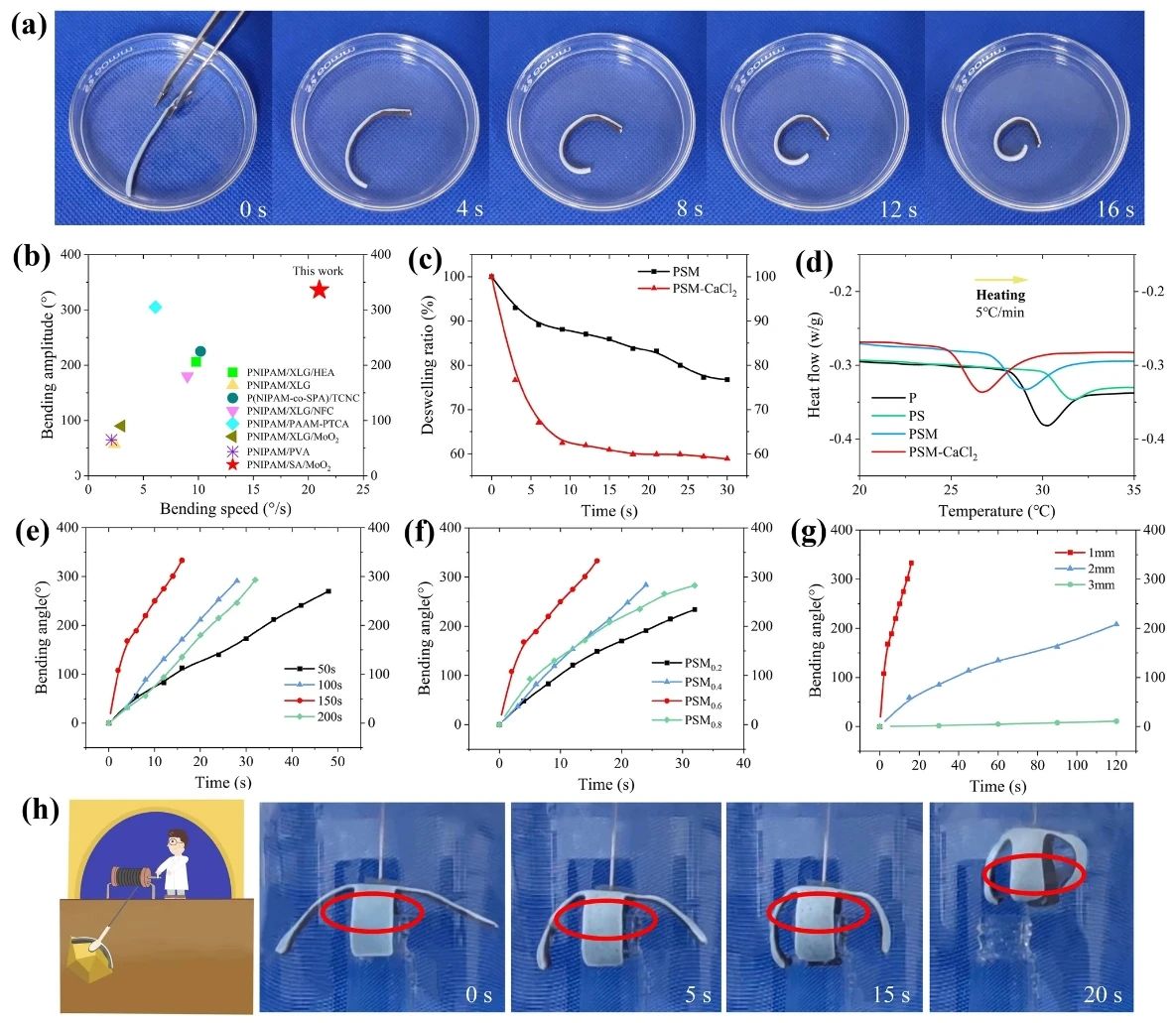
图3. PSM水凝胶的热响应驱动。a厚度为1 mm的PSM水凝胶在50°C水中的弯曲行为。b不同水凝胶致动器在外部刺激下的弯曲速度和弯曲幅度的比较。c PSM和PSM-CaCl2水凝胶在50°c水中的溶胀曲线。d P、PS、PSM和PSM-CaCl2水凝胶的DSC曲线。e CaCl2浸泡时间对50°C水中弯曲响应的影响。f水凝胶中MoO2含量对50°C水中弯曲响应的影响。g水凝胶厚度对50°C水中弯曲响应的影响。h PSM水凝胶夹具从50°C水中抓取金属片的过程。
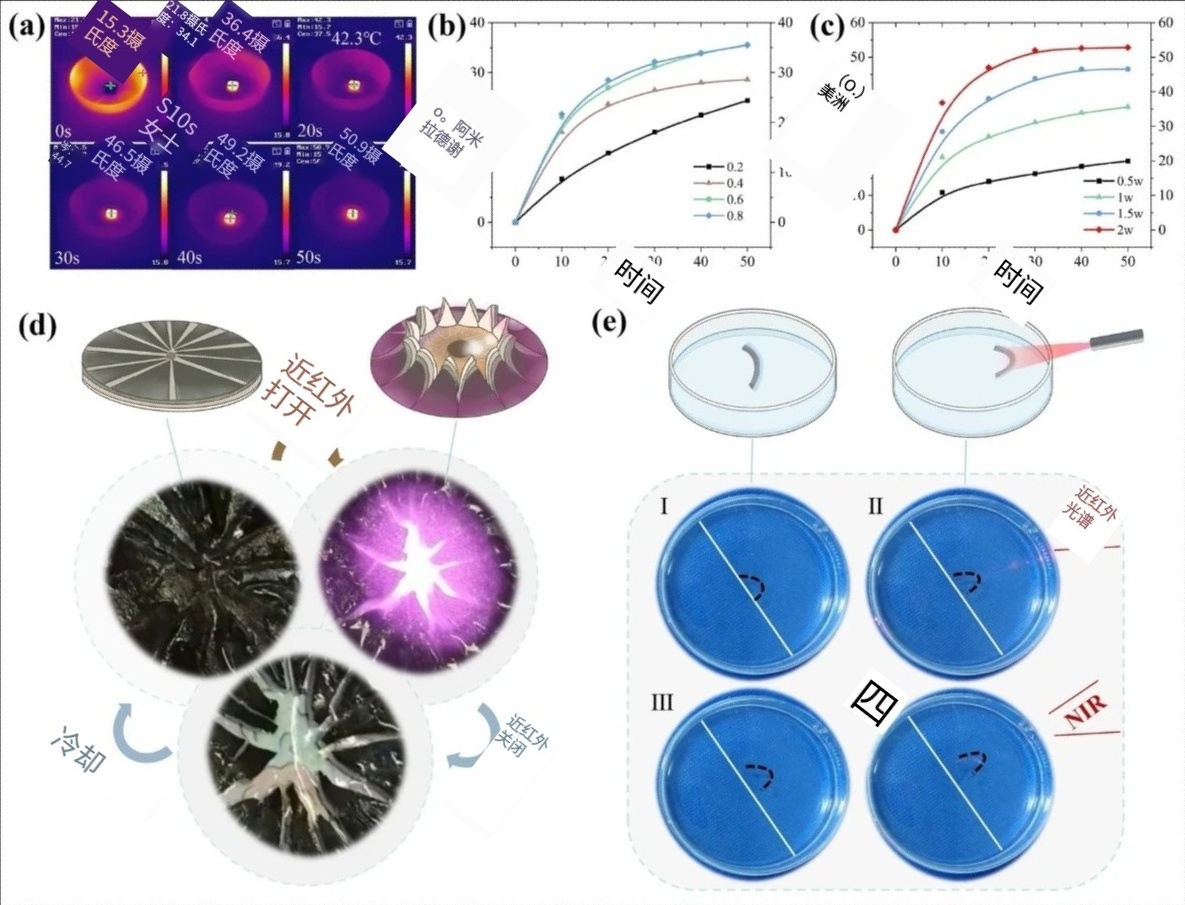
图4. PSM水凝胶的光响应驱动。a PSM0.6水凝胶在1 W cm−2的808 nm近红外光照射下的温度变化。b具有不同MoO2含量的PSM水凝胶在近红外光照射(808 nm,1 W cm−2)下的温度响应曲线。c不同功率密度的PSM0.6水凝胶在808 nm激光下的温度响应曲线。d人工虹膜的示意图和照片。e仿生水母在近红外开关下游泳的示意图。
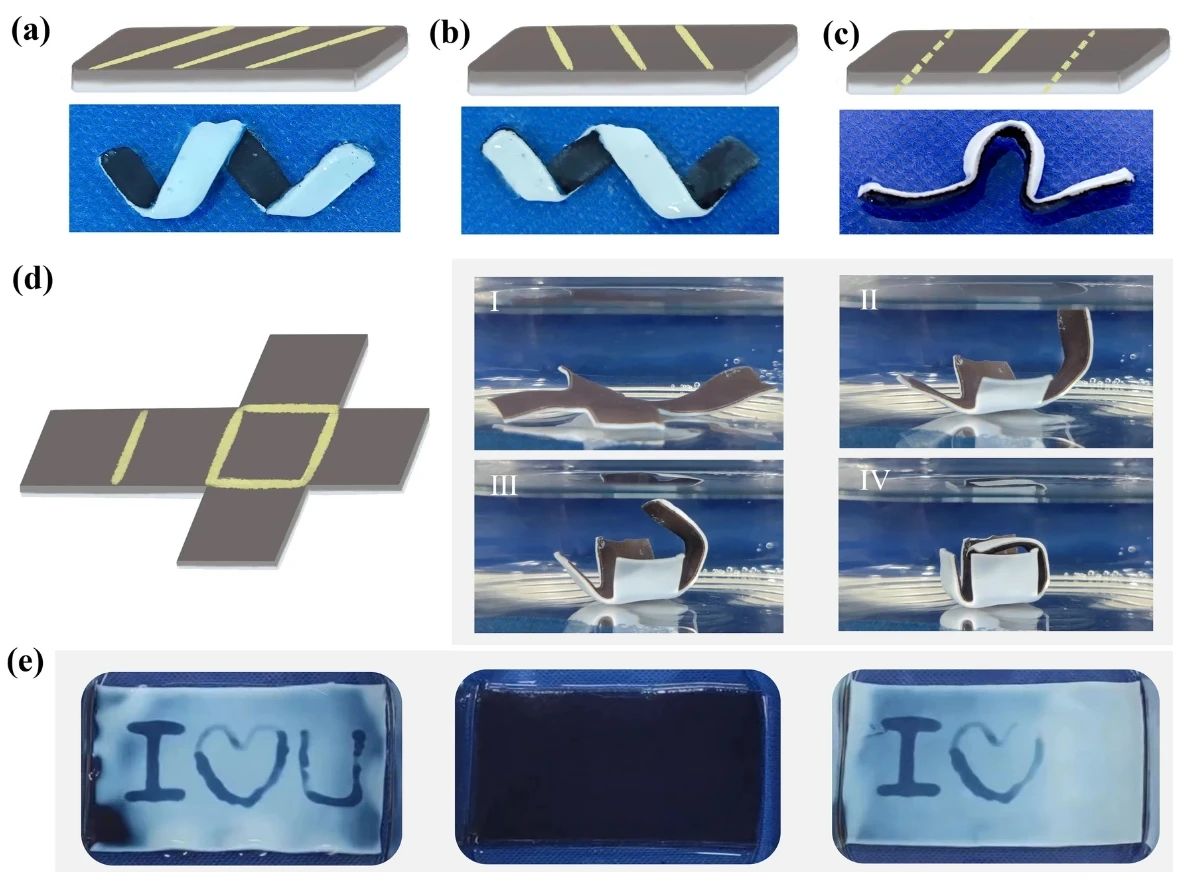
图5. PSM水凝胶的可编程变形和信息显示。a用Ca2+涂覆的左倾斜浸渍的示意图和照片。b用Ca2+进行右倾斜浸渍的示意图和照片。c正向和反向浸涂Ca2+的示意图和照片。d自组装折叠立方体的示意图和照片。e显示和隐藏PSM水凝胶中的信息。
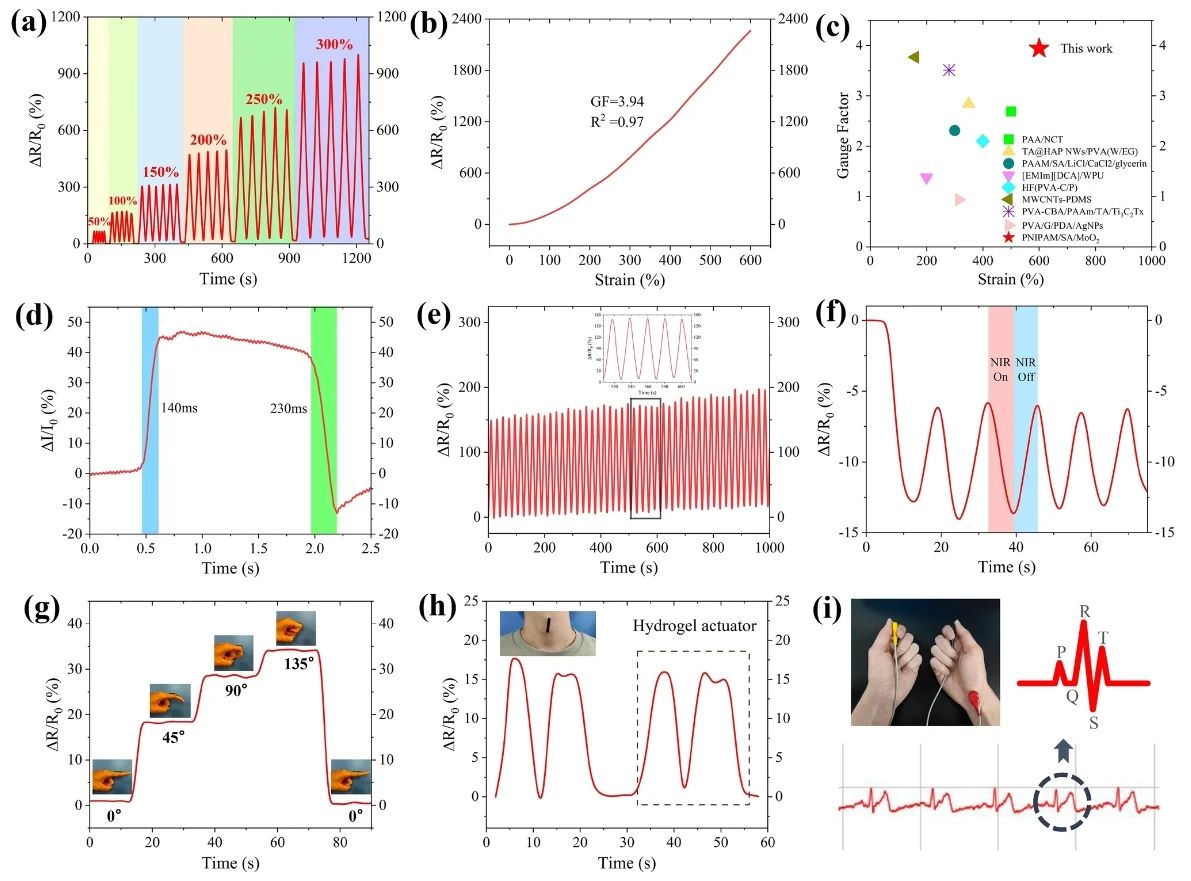
图6. PSM水凝胶的传感性能。a PSM水凝胶的RRCs用范围从50%到300%的应变拉伸。b PSM水凝胶的RRCs与应变的关系。c水凝胶的应变系数和应变的比较。一些典型报告的应变传感器在600%应变范围内的应变系数比较。d PSM水凝胶在拉伸松弛过程中的响应/恢复时间。e PSM水凝胶在100%应变下50个循环的RRCs。f通过周期性地打开和关闭近红外辐射,以5个周期改变PSM水凝胶的电阻。g不同角度(0、45°、90°、135°)手指运动的PSM水凝胶的RRCs。h PSM水凝胶的RRCs粘附在喉咙上,以响应“水凝胶致动器”。i PSM水凝胶检测到的心电图信号。
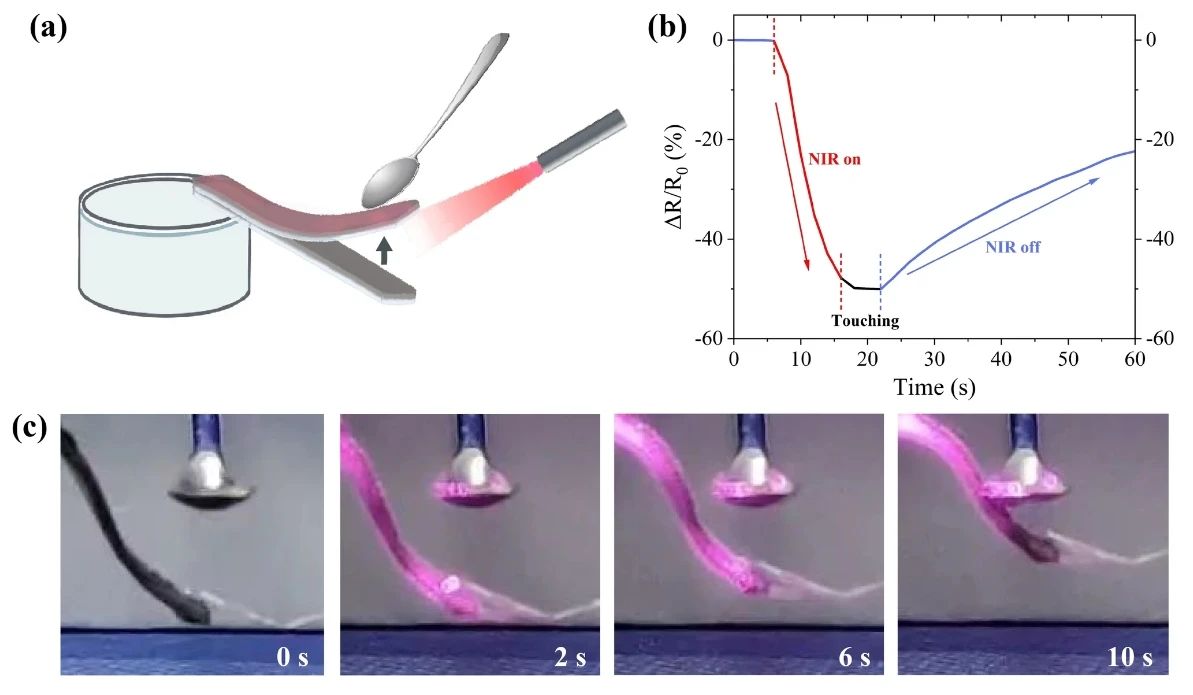
图7. 自感应仿生人造舌头。a示意图,b RRC和c人造舌头在近红外刺激下触摸小勺子的过程。
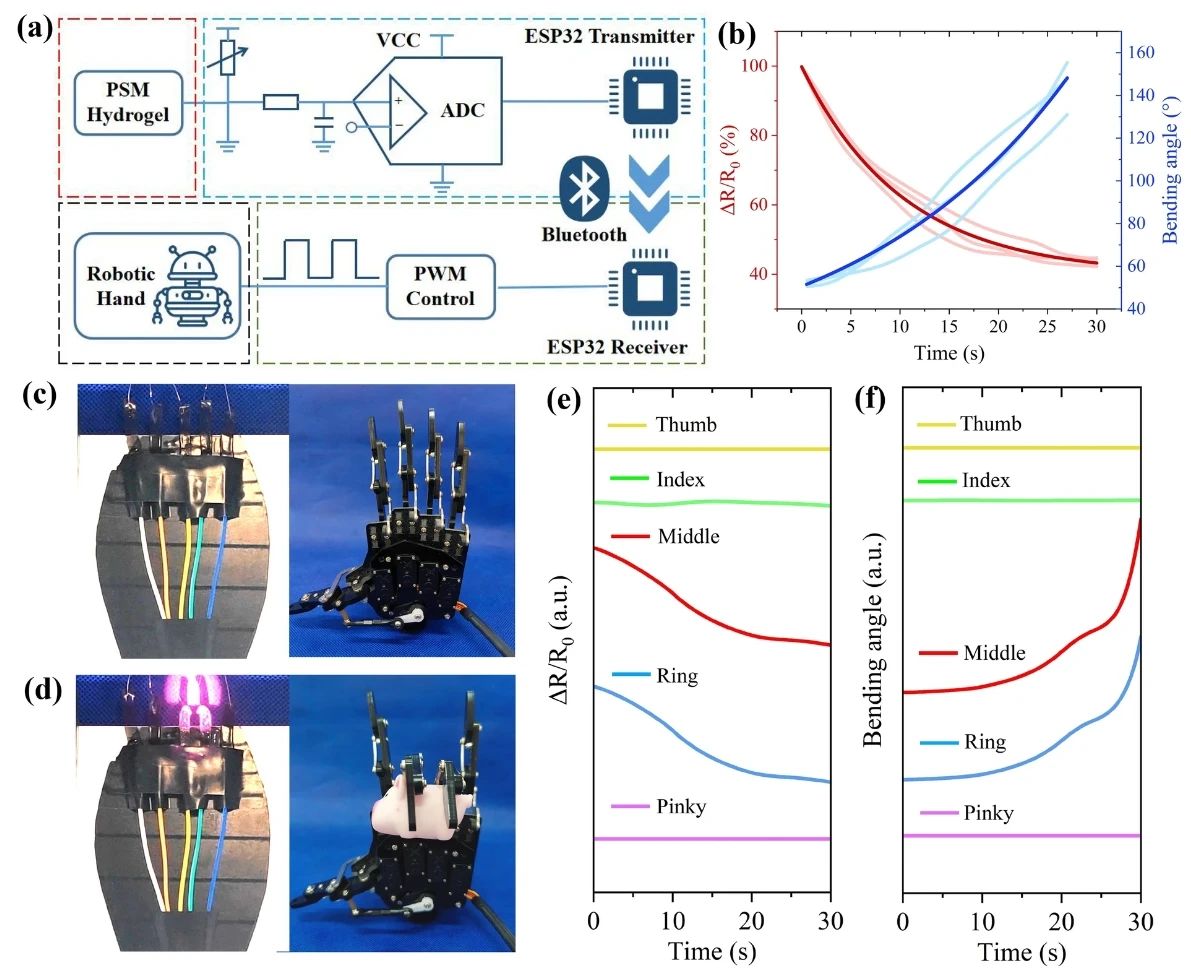
图8. 软硬机器人远程交互系统。a 示意图。b PSM水凝胶的阻力和弯曲角度的拟合曲线基于三个测试样品。自感应水凝胶致动器的NIR刺激之前c和之后d,控制蓝牙交互式机械手抓握猪玩偶。e五种PSM水凝胶致动器在近红外刺激下的实时电阻变化。f五个机器人手指在远程交互中弯曲角度的实时变化。
以上文章转载于微信公众号 CAAI认知系统与信息处理专委会,如有侵权,请及时联系我们修改或进行删除。