国际仿生科技平台

仿生柱状粘合剂在干燥和潮湿表面的强黏附力和耐久性对其应用至关重要。结构黏附表面实现强黏附的关键在于表面上精细的亚微米结构设计,可以和表面形成很好的接触,但这些精细结构在重复使用过程中容易损坏而导致黏附能力下降。来自武汉大学的薛龙建教授团队联合浙江大学及香港理工大学相关学者开发了一种受树蛙启发的梯度复合微柱阵列 (GP)。与纯聚二甲基硅氧烷微柱阵列 (PP) 相比,它不仅实现了2.3倍的干黏附力和5.6倍的湿黏附力,还具有超过200次黏附循环的优异鲁棒性和自洁能力。这项研究为机器人、半导体加工、医学工程等领域提供了一种可逆粘合剂的新设计策略。
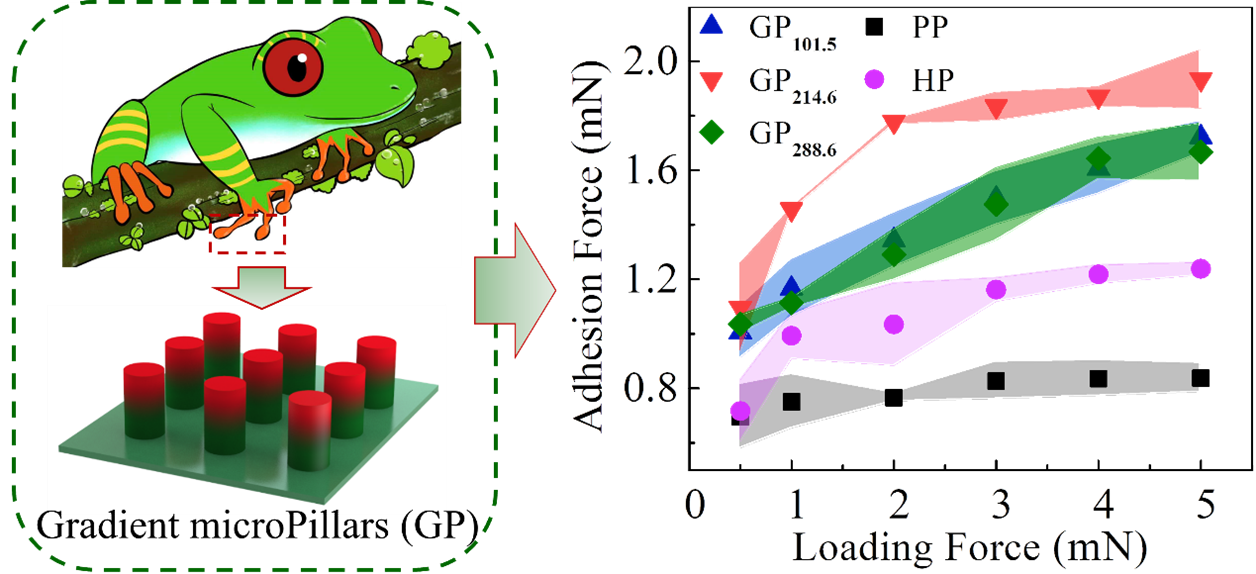
图为受树蛙启发的梯度复合微柱阵列设计图及不同负载作用下黏附力。
研究过程与结果
GP的制备
结合软印刷与离心沉降技术在微柱中形成纳米颗粒的梯度分布,制备得到GP。通过真空辅助毛细管填充工艺将碳酸钙纳米颗粒 (CaCO3 NPs)/聚二甲基硅氧烷 (PDMS) 前驱体混合物填充到聚氨酯 (PU) 模具中,并用抹刀刮掉PU模具表面多余的PDMS/CaCO3混合物。然后将填充有PDMS/CaCO3混合物的PU模具放置在培养皿上,以预定的离心速率离心沉降特定的时间。沿模具微腔轴向的水平离心力使得CaCO3 NPs向PU模具微腔的底部移动形成梯度分布。再将PDMS前驱体浇注到PU模具表面,形成500 μm厚的背衬层。在90℃温度下固化1小时,并从PU模具上脱模即可得到梯度微柱GP。均质复合微柱阵列 (HP) 的制造过程与梯度微柱相同,但不包含离心过程。PP的制备方法则是将纯PDMS前驱体倒入PU模具中,并在90℃下固化1小时。
黏附性能
采用自制装置测量微观干黏附性能。直径5 mm的玻璃球形探针以30 μm/s的速度接近微柱阵列,并与微柱阵列形成接触达到预定负载。然后,探针以相同的速度远离表面,探针与微柱阵列分离时所需的拉脱力视为微柱阵列的法向黏附力 (Fad)。
当CaCO3 NPs浓度 (Ccal) 为10 wt%—30 wt%时,Fad随着梯度率的增加而略有增加。当 Ccal 为50 wt%时,Fad在梯度率为 254.7 kPa/μm时达到27.2 ± 1.1 kPa。当初始Ccal为70 wt%时,Fad在梯度率为214.6 kPa/μm时达到31.9 ± 1.8 kPa,是PP的2.3倍。在接触界面有水时,GP的湿黏附力比干燥表面的黏附力要小得多,Fad在GP214.6 (下标表示梯度率) 表面仅达到5.8 ± 1.0 kPa。尽管如此,GP214.6的湿黏附力仍比PP和HP要高很多,分别是PP (1.0 ± 0.1 kPa) 和HP (2.8 ± 0.4 kPa) 的5.6倍和2.1倍。
GP的自洁能力
微柱阵列的几何结构和GP微柱末端较大的粗糙度 (Sa = 28.2 ± 4.9 nm) 使得GP 的水接触角达到147.9 ± 0.9°。良好的疏水性赋予GP自清洁能力。灰尘污染的GP通过简单的水流冲洗,即可完全恢复其黏附能力。经过10次污染和清洁循环后,GP的黏附力保持不变。这充分证明了GP在污染条件下的鲁棒性和自清洁能力,这对GP在实际环境中的重复使用具有重要意义。
研究总结
受树蛙粘性脚趾垫梯度模量的启发,该工作成功设计并构建了一种复合梯度微柱阵列 (GP),其弹性模量沿微柱高度从根部到尖端逐渐增加。GP的软根起到与沙漠甲虫刚毛细颈结构类似的作用,降低了GP的弯曲刚度,从而有利于与起伏表面的有效接触。高模量末端增加了分离所需的最大应力,从而增强了黏附力。GP的柱顶粗糙度略有增加,增加了疏水性,使其在潮湿条件下具有更强的附着力和良好的自清洁能力。因此,在干燥和潮湿条件下,GP的黏附力分别是纯PDMS微柱阵列的2.3倍和5.6倍。研究结果提供了一种具有强干/湿黏附力的结构黏附材料,其在各种条件下具有广泛应用前景。
以上文章转载于微信公众号MDPI工程科学,如有侵权,请及时联系我们修改或进行删除。