国际仿生科技平台

想象一下,在不久的将来,当你踏入家门时,迎接你的不再是蹦蹦跳跳的宠物或家人温暖的拥抱,而是一个能够感知你的情绪、帮助处理家务,甚至与你进行深入对话的人形机器人,这将会是一种怎样的体验?这听起来像是科幻小说中的情节,但这一未来景象正在逐渐变为现实。
中国科学院理化技术研究所刘静课题组在多年探索液态金属可变形机器原理的基础上,系统提出了旨在构筑未来人形机器人的液态金属基本要素和设计思想,从而为人形机器人进一步迈向柔性化、敏捷化以及更加类人化、智能化构画出了新的发展蓝图和技术路线,其前瞻性评述文章以“Bioinspired Liquid Metal based Soft Humanoid Robots”为题,发表在《Advanced Materials》期刊上。文章第一作者为博士生李楠,通讯作者为刘静研究员。
刘静小组自首次发现液态金属多变形现象(Adv. Mater. 2014,26,6036)以及液态金属自驱动软体机器效应(Adv. Mater. 2015, 27, 2648)以来,又相继揭示了一系列独特的液态金属可变形机器效应和规律,如液态金属大尺度可逆变形效应(Sci. Rep. 2014, 7116)、液态金属电控射流现象(Appl. Phys. Lett. 2014, 105, 134104)、液态金属过渡态机器效应(Small 2015, 11, 5253)、固液组合机器振荡效应(Adv. Sci. 2016, 3, 1600212)、液态金属动力车辆(RSC Adv. 2016, 6, 56482)、液态金属水母(Soft Robot. 2022, 1098)、弹跳机器人(Adv. Eng. Mater. 2021, 2100515)以及液体集成理论(AISY. 2019, 1900017)等,一个超越传统的柔性机器人领域得以快速成型,为研制更为复杂且贴近生活的智能机器人打开了诸多空间。为促成领域跨越式发展,在此篇论文中,作者们系统剖析了液态金属及其衍生物在推动柔性仿生机器人实现突破的巨大潜力,通过对仿生学的全面解读,总结了液态金属在构建类人机器人中的多面手角色——作为柔性传感器、执行器、动力源、逻辑单元、网络系统,甚至是可变形骨骼等。文章指出,通过集成这些组元与柔性机构,并借助液态金属的独特属性,可以开发出多功能且灵活敏捷的机器人,从而更好地满足人类需求。这一从传统金属框架向类似生物有机体的混合式软硬结构的过渡,将在机器人设计领域引发一场变革。
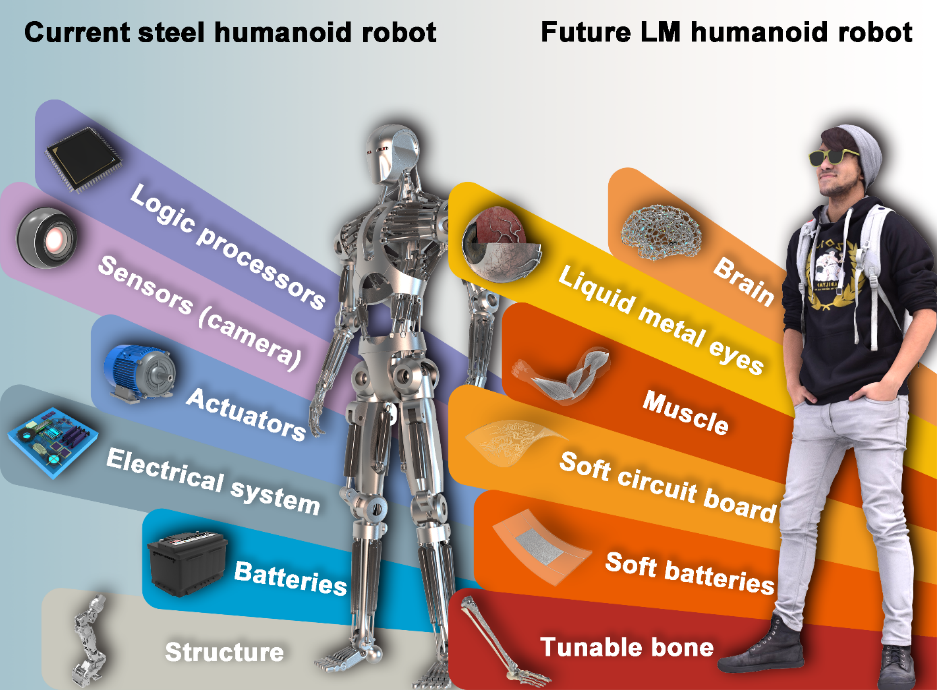
▲图为未来人形机器人的进化路线,将从刚体结构转向更像人类的柔软性。这需要将逻辑器件、传感器、执行器、电路系统、电池和结构转换为液态金属柔性部件。
执行器:机器人运动的核心
执行器是构建人形机器人最为核心的部件之一,目前多种液态金属基柔性执行器正被加紧探索中,如液态金属电执行器、电磁执行器、液晶弹性体执行器、介电弹性体执行器以及一些电热执行器已被逐步研发出来。
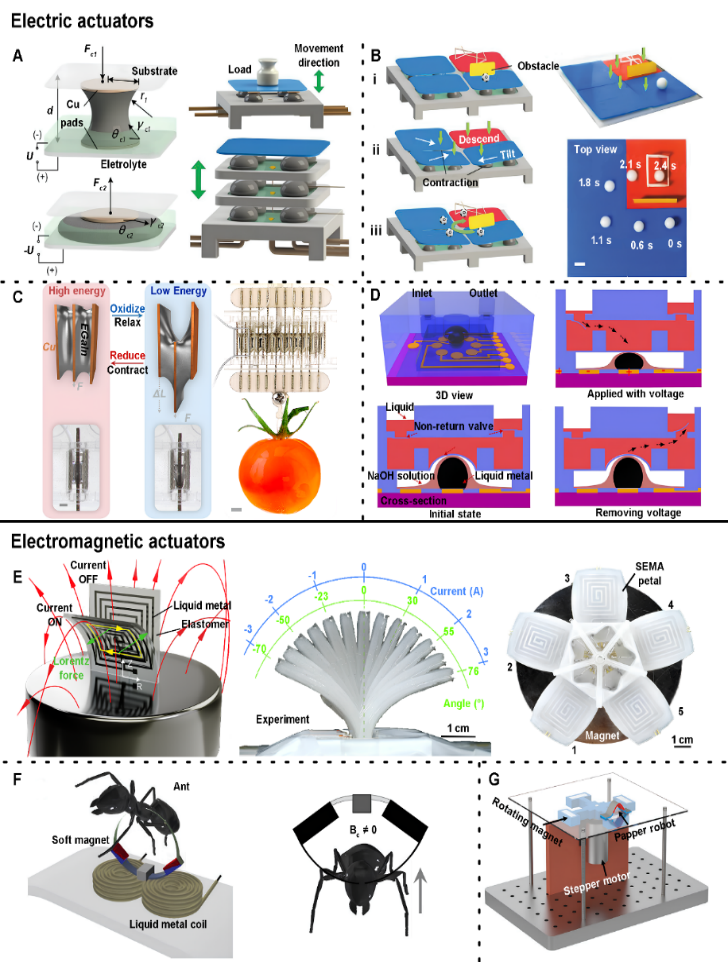
▲图A-G为各类电动和电磁执行器。图A为液态金属表面张力驱动的电气控制行为可以作为一个执行器,多个执行器可以集成;图B为基于电动执行器的货物交付系统;图C为类似天然肌肉的层状液态金属驱动器;图D为基于液态金属的人工心脏;图E为柔性电磁执行器;图F为采用液态金属可拉伸导线和软永磁体的微型电磁夹持器;图G为磁性液态金属纸的蠕虫状运动。
感官系统:机器人与环境互动的桥梁
液态金属基的各种应力传感器、压力传感器、触觉传感器、温度传感器、气体传感器、光学传感器、惯性传感器和可重构天可在极大程度上为未来人形机器人构建感官系统。下图总结了压力传感器应用于人形机器人感知系统的情形。限于篇幅,其他类型传感器这里不作赘述,详见作者原文,对于执行器、电路系统、电池和结构组件等单元同理。
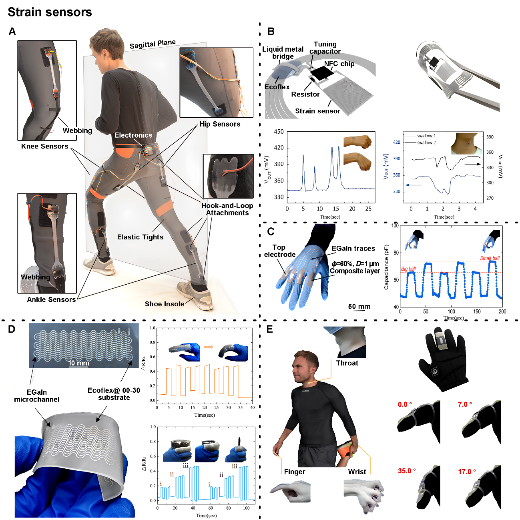
▲图A-E为液态金属压力传感器。图A为在每个下肢关节处放置柔性压力传感器以捕获运动信息;图B为一种粘附皮肤、可拉伸的集成压力传感器,设计用于无线监测人体运动;图C为用于姿态检测的液态金属电容式压力传感器;图D为改进的波浪形压力传感器;图E为可同时检测温度和变形的双参数传感器。
能源系统:机器人生命的源泉
电池技术是未来人形机器人的能源心脏。液态金属不仅可以缓解传统锂电池的枝晶膨胀和电极断裂问题,还可用于构建可拉伸柔性电池,并模拟生物学能源所独有的存储即使用的用能方式,为柔性能源器件贡献一份力量。
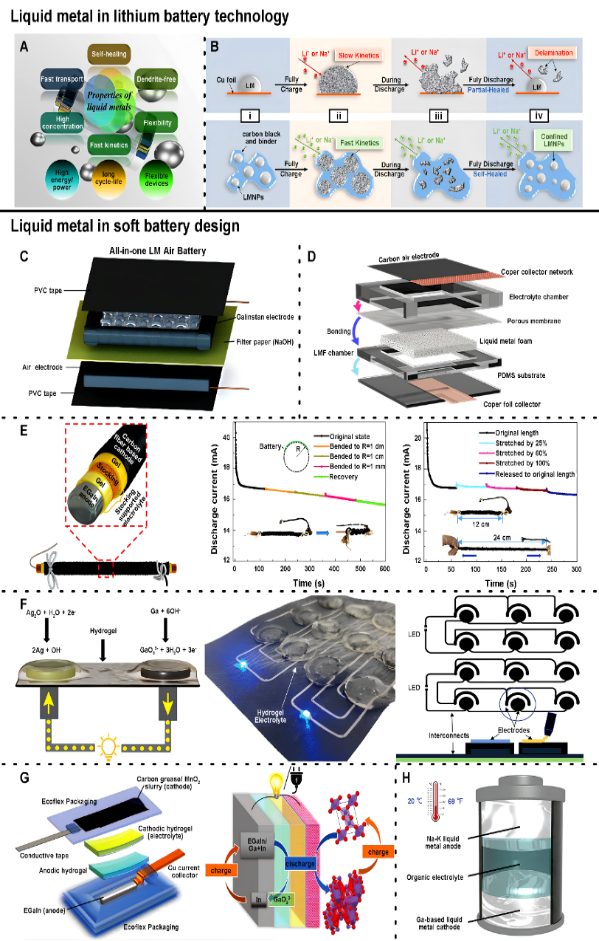
▲图A-H为液态金属锂电池技术和柔性电池设计。图A为液态金属及其电池的性质;图B反映出液态金属的引入可以有效地缓解碱金属电极枝晶生长,提高其循环寿命和安全性;图C为集储能、传感、信号传递于一体的柔性液态金属空气电池(All-in-one battery);图D为液态金属多孔结构的柔性可变形液态金属空气电池;图E为纤维状液态金属空气电池;图F为 3D打印可拉伸液态金属电池;图G为柔性EGaIn-MnO2电池,用于可拉伸电子设备;图H为环境温度下的全液电池。
逻辑器件:机器人大脑的核心
相较于传统的刚性逻辑器件,液态金属在柔性逻辑和计算系统的开发上迈出了重要的一步。从仿生角度而言,未来人形机器人的大脑一定是柔性的,且目前的液态金属也十分具有发展柔性逻辑器件的潜力,例如液态金属逻辑器、液态金属开关、液态金属二极管、液态金属存储器、液态金属交直流转换器等均已得到初步开发。
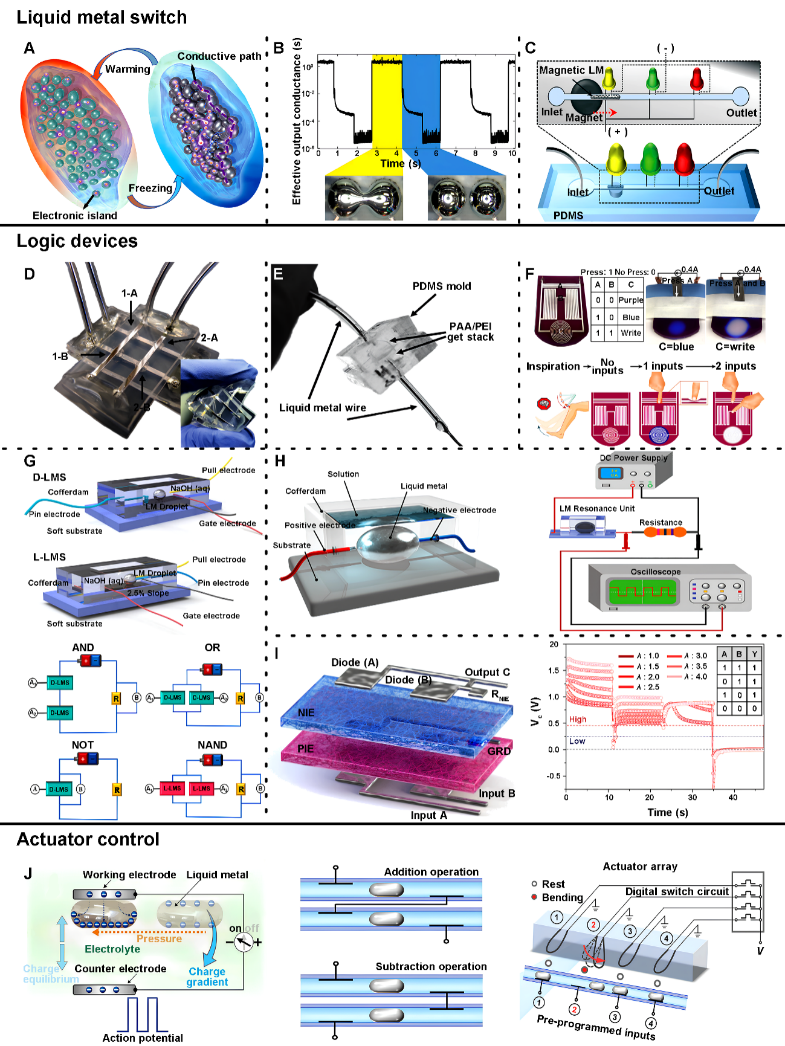
▲图A-J为液态金属开关,逻辑器件,执行器控制。图A为温度控制的开关材料;图B为电控液态金属开关;图C为磁控液态金属开关;图D为 2 × 2交叉棒阵列的柔性忆阻器;图E为精确控制氧化层厚度的柔性二极管;图F为柔性热致变色触觉逻辑控制系统;图G为基于液态金属的逻辑控制单元的两种变体;图H为 DC-AC变换器;图I为二极管具有高拉伸性,可以承受高达500%的变形而不会发生故障;图J为具有逻辑计算和执行器控制功能的液态金属机电一体化装置。
电路网络:机器人神经与血管系统的基础
相较于铜线的刚性而言,液态金属赋予了人形机器人可靠的柔性电路网络构建方案。从复杂的电路图案制备,到柔性电路板,再到柔性可拉伸导线,液态金属为构建人形机器人的神经(传递信号)和血管(传递电流)网络系统提供了不二选择。
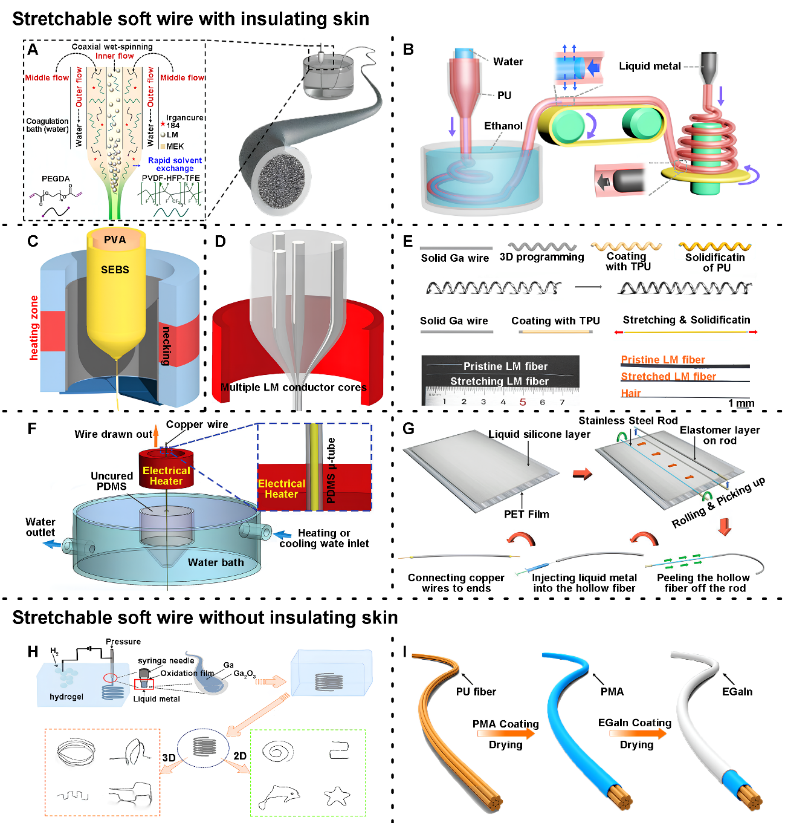
▲图A-J为可拉伸液态金属柔性导线。图A为室温下采用同轴湿纺工艺制备液态金属包芯线材;图B为在室温下使用顺序微流体纺丝和注射方法快速制备液态金属丝;图C为用于制作空心线壳的PVA材料;图D为含有多个液态金属导体铁芯的单一弹性体(SEBS);图E为利用Ga的相变特性制作线材;图F为连续生产PDMS空心线套;图G为辊涂技术;图H为在水凝胶上电化学氧化生成连续的镓线;图I为一种中间嵌有弹性体的液态金属纤维。
结构组件:机器人的可变形骨骼
具有多种室温附近熔点的液态金属承载着在电、磁、热等物理场下大幅度发生刚性转变的能力。这种液态金属骨骼将赋予未来人形机器人更多的新功能,如可变形、可重构。
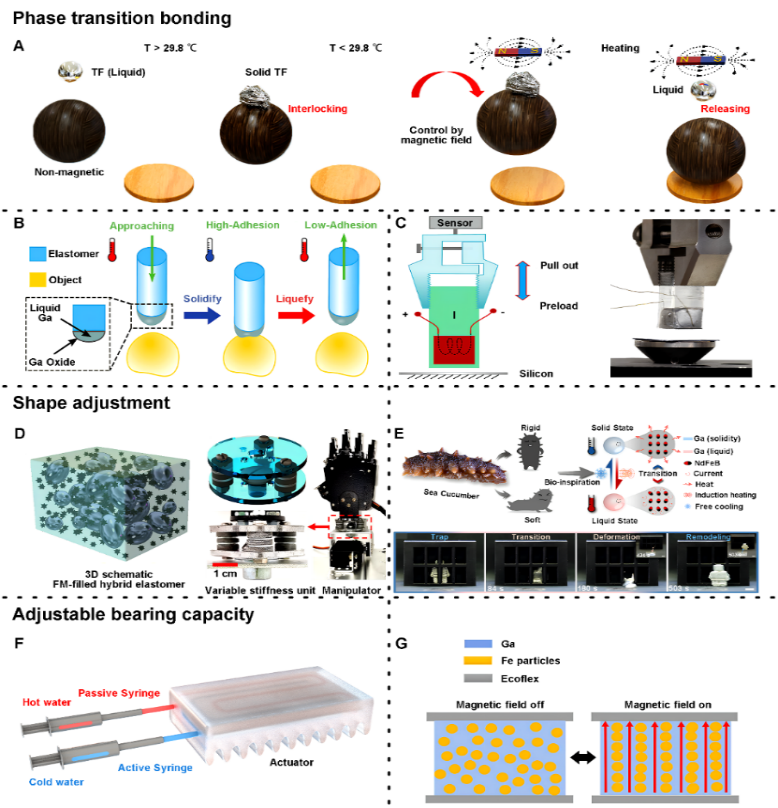
▲图A-G为基于液态金属的可调刚度结构,包括相变粘接、形状调整和可调承载能力。图A为液态金属的相变能显著增强其粘附性能;图B为涂覆液态金属的PDMS柱的粘附行为;图C为液态金属与表面之间的间接接触附着力;图D为用于补偿机器人机械手位置的形状适应性材料;图E为海参组织硬度可逆变化引发的固液快速转变;图F为利用液态金属的固液相转变来提高柔性执行器的承载能力;图G为材料的刚度可通过外加磁场调节。
未来展望
液态金属在人形机器人中具有全方位的应用潜力,涉及柔性执行器、传感器、电池、逻辑器件、电气系统、可变形骨骼、网络系统以及更多仿生型解剖单元和机构。这些新型液态金属单元可望大幅度改观现有人形机器人的功能,并为未来人形机器人通向更智能、更友好、更安全铺平道路。
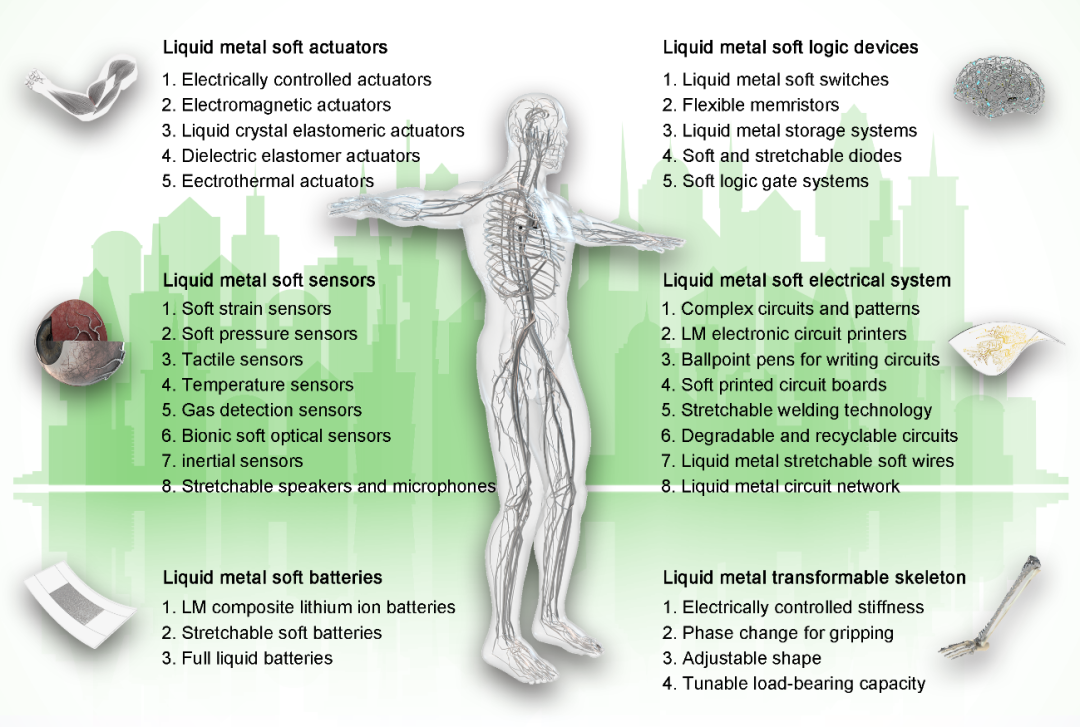
▲图为人形机器人中的液态金属单元及其各种潜在应用总结,涵盖柔性致动器、传感器、电池、逻辑器件、电气系统和可变形骨骼等。
以上文章转载于微信公众号高分子科学前沿,如有侵权,请及时联系我们修改或进行删除。