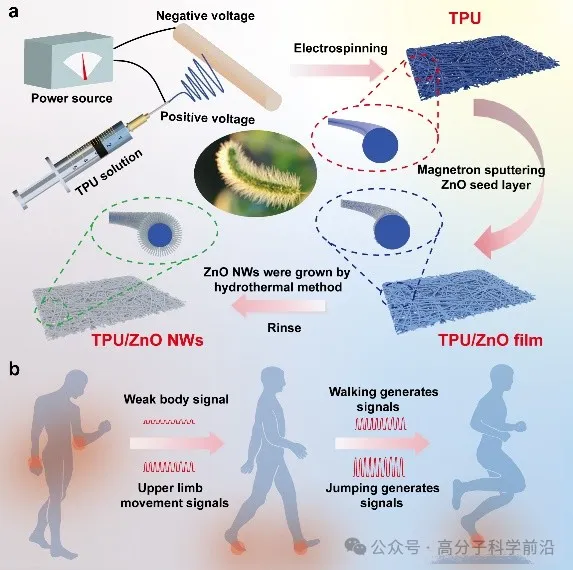
北京航空航天大学潘曹峰教授和鲍容容教授团队提出了一种仿生狗尾草的电阻型柔性压力传感器,同时实现了29.7 kPa-1的高灵敏度和高达2250 kPa的超宽线性检测范围。
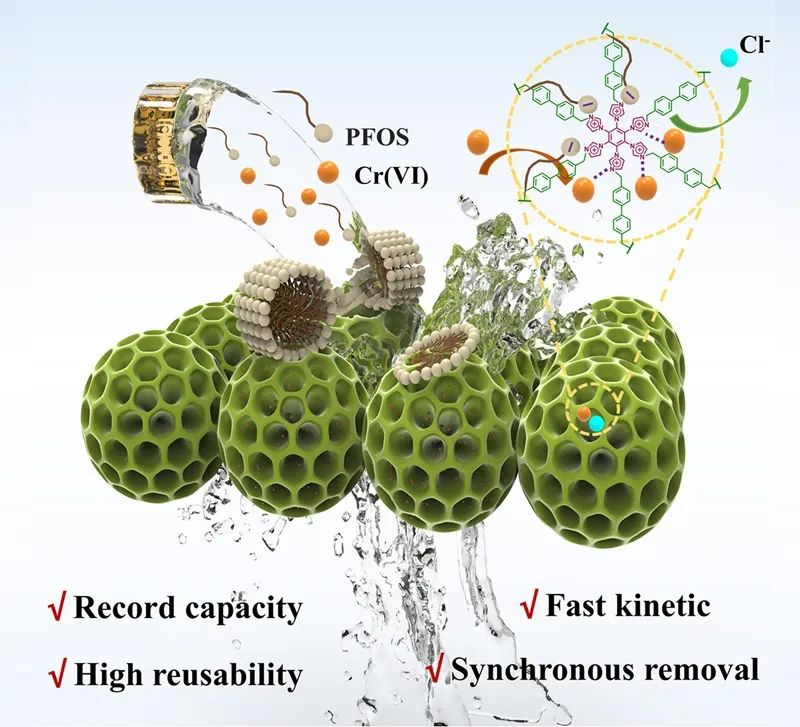
河北工业大学化学与化工学院王瑞虎研究员和梁均博士等在化工和环境著名学术期刊Chemical Engineering Journal 上发表研究论文,针对同时吸附移除水体中重金属阴离子和全氟烷基化合物的科学难题,提出了一种基于多孔离子聚合物的仿生吸附系统,该系统具有高密度咪唑鎓盐和抗衡氯离子以及多级孔结构,可以有效地同时去除全氟辛烷磺酸 (PFOS) 和重铬酸盐。
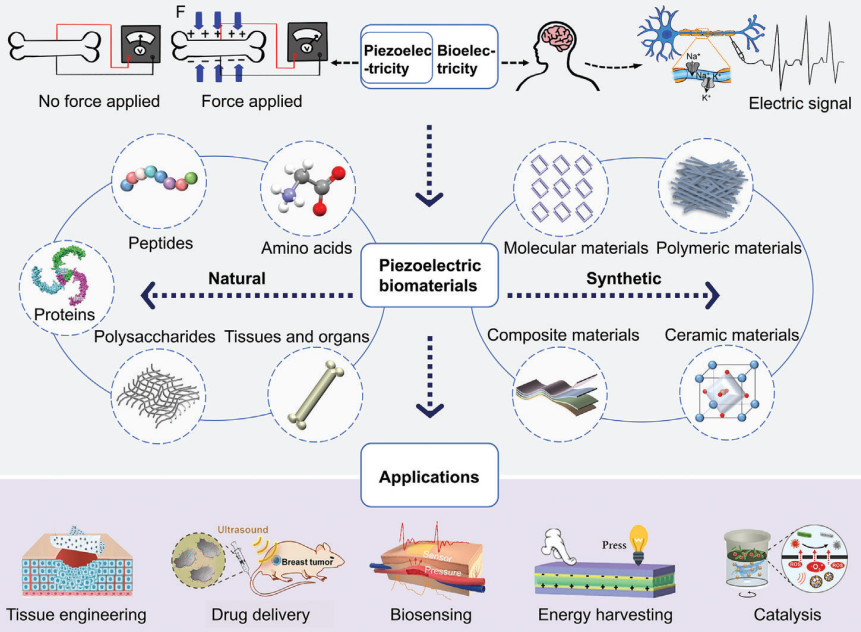
生物电可通过电刺激调节细胞/组织的行为和功能。在人体中,生物电可以在电机械响应的组织和器官中产生,也可以在具有压电性能的生物分子构建模块中产生,这种现象被称为压电效应。
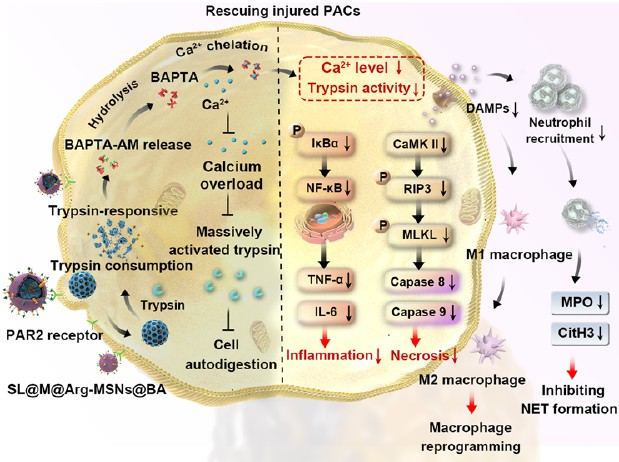
如何将靶向受损胰腺腺泡细胞(PACs)的策略与病理生理特异性药物治疗进行结合是急性胰腺炎(AP)治疗面临的一项重大挑战。 有鉴于此,中国海洋大学何治宇教授利用胰蛋白酶在活性S1口袋上通过Asp189选择性识别精氨酸上的胍基以及通过催化三联体切割羧基端(C-端)酰胺键的能力,设计并合成了一种由基于精氨酸的酰胺键桥接的胰蛋白酶裂解有机二氧化硅前体。
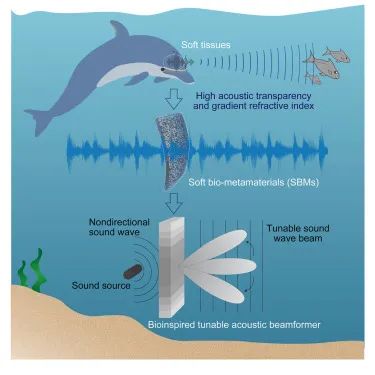
海豚是海洋中最聪明和复杂的生物之一,它们的声纳系统是自然界中最先进的声学工具之一。这种声纳系统,称为回声定位,允许海豚通过发射高频声波并接收反射回来的回声来探测和分析周围环境。这个系统使海豚能够在黑暗或浑浊的水中精确定位猎物,识别障碍物,并与同伴交流。