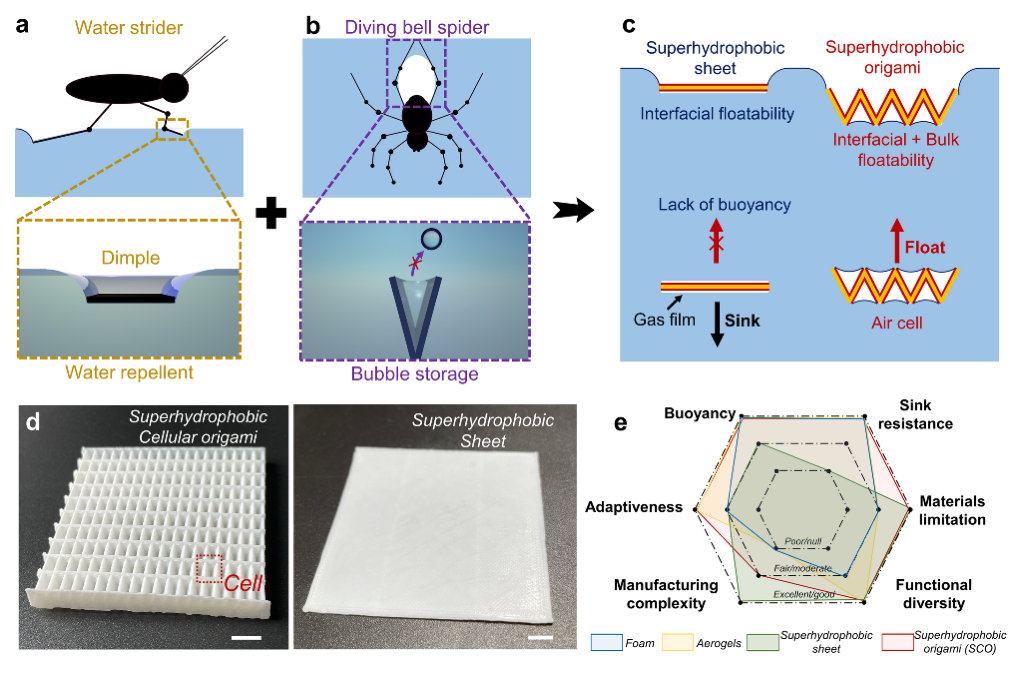
水生植物奇妙的漂浮性质一直是启发科研工作者创新思考的灵感来源。相关研究团队分别于2017年和2022年提出了荷叶(Adv. Funct. Mater. 2017, 27, 1701466)以及大薸(Mater. Horiz. 2022, 9, 1888)稳定漂浮能力的协同浸润性解释,为仿生漂浮载体的设计与构建提供了思路。此类漂浮载体有望在界面日光蒸发、微探测器和多相催化等多个领域发展提供有价值的载
自然界的生物经过数十亿年的进化和选择,通过其优雅的结构、巧妙的机制和卓越的性能在地球各种环境中取得了空前的成功。这一成功不仅激发了各领域研究人员的灵感,也催生了许多令人兴奋的研究领域和实用产品。在自然界中,有一类隐翅虫(Stenus Comma),当受到天敌威胁时,能够在水面上迅速获得高速度和加速度,从而逃脱危险,如图1。这种行为为昆虫尺度的水面推进器的设计和操控提供了极佳的仿生对象。
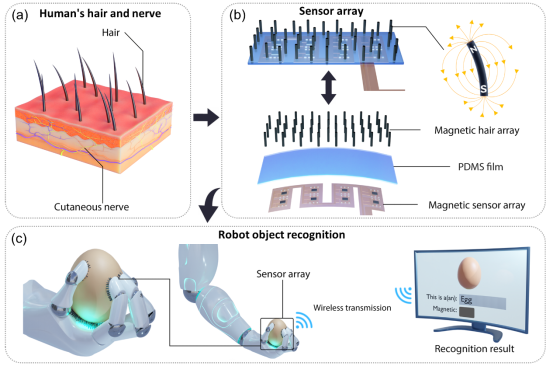
近日,中国科学院空天信息创新研究院的陈嘉民研究员和他的团队在国际知名期刊《Advanced Science》上发表了一项关于柔性磁敏触觉传感器的重要研究成果。这一创新技术,模仿了人类皮肤毛发的结构,能够精确地感知接触力。在机器人物体识别和滑动检测方面表现出色,开启了智能机器人感知世界的新篇章。
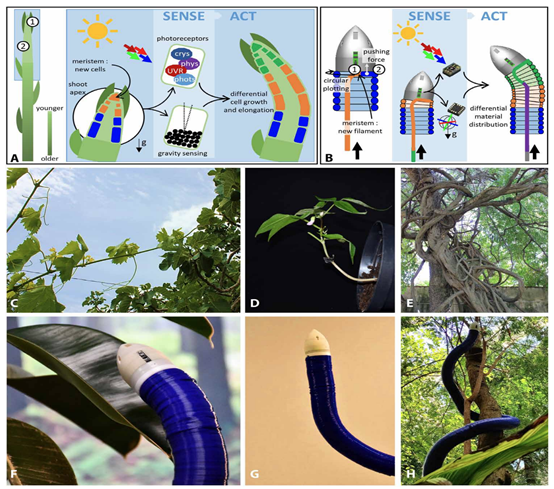
FiloBot通过模仿攀爬植物的生长方式——通过在顶端增加材料来构建身体,实现在难以预测和复杂的环境中的导航。这种设计理念的核心在于能够适应多种地形并克服障碍,特别适用于密集森林或杂乱区域这样的非结构化环境。机器人使用添加制造技术(特别是熔融沉积建模,FDM)来创造其生长结构。
随着技术的进步和社会的发展,可穿戴智能电子产品已经应用在我们生活的各个方面,如医疗保健、电子皮肤,人机交互,能量获取等方面。然而,可穿戴智能电子设备的长期能源供应一直是一个难以解决的问题。在可穿戴智能电子产品中,由于电池容量有限,体积大,灵活性弱,充电频繁,使之成为向智能化、小型化和长期使用的障碍。因此,想要发展具有广泛适用性的能量供应单元,小型化、灵活性和长期能源供应仍然是可穿戴电子产品面临的巨