在电子器件领域,实现柔软的生物组织与硬质电子设备的标准化接口一直是一项挑战。生物组织不仅柔软,其形状和尺寸也多种多样。如果能开发出一种生物相容性薄膜,类似于工业包装中常见的“热收缩膜”,或许能够实现对各种形状和尺寸的生物-电子接口的理想匹配。然而,寻找能制造这种生物相容性收缩薄膜的材料并非易事。常见的热收缩膜往往比生物组织更硬,而且需要较高温度才能收缩,无法在人体温度下使用。
研究背景大量的研究致力于具有高结构各向异性的肌腱模拟材料的工程,各向异性的水凝胶成为研究的重点,然而,这些水凝胶的模量比天然肌腱的模量低几个数量级,加入成束纤维可赋予水凝胶复合材料高硬度。然而,控制硬纤维和软基质之间的相互作用以模拟承重软组织中的微结构相互作用是一项挑战。
管内爬行机器人作为一种特种设备,在近几十年内得到了深远的发展。根据构型的不同,可以将管内机器人分为:轮式、履带式、被动式、链条式、蠕动式、多足式等。在现有构型的基础上,按照设计理念的不同可以将管内机器人的构型进一步细分为传统构型和仿生构型两种。
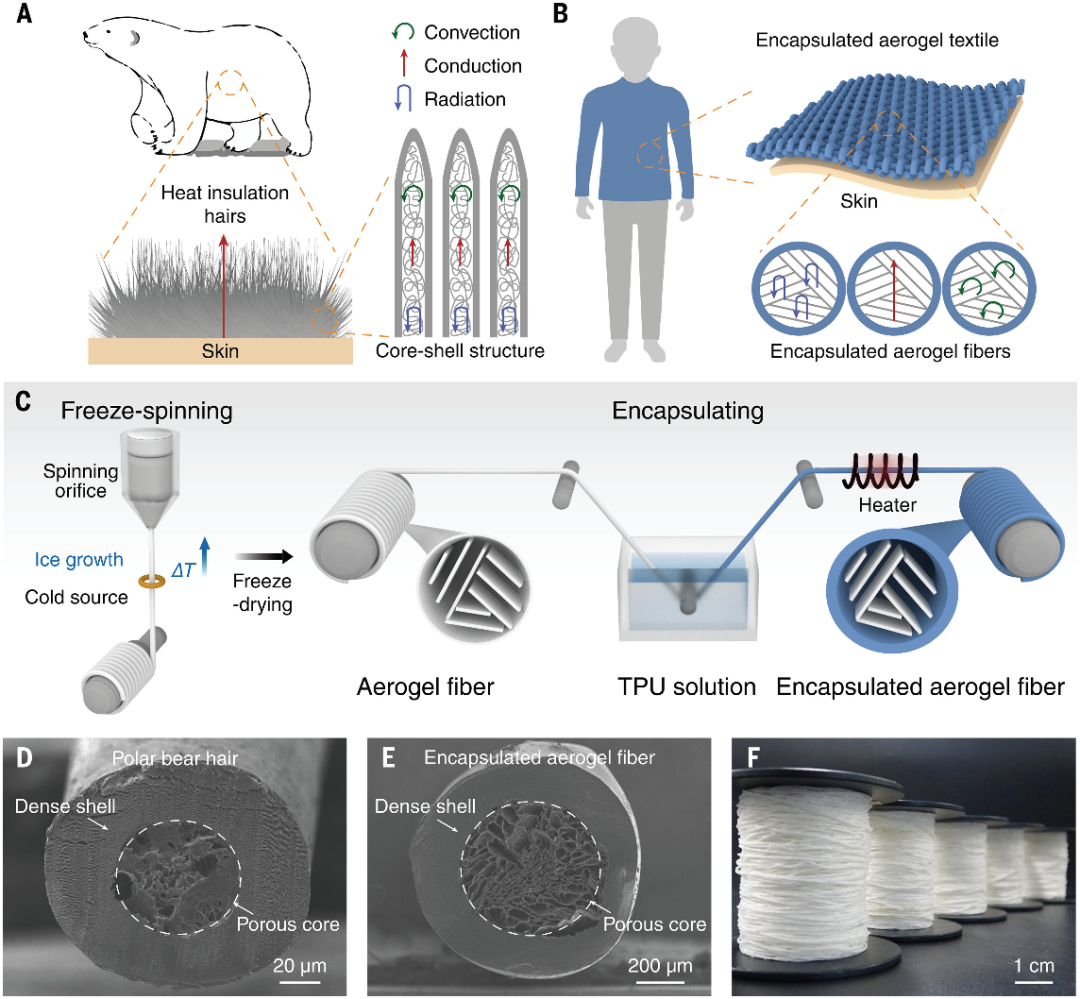
自 1931 年气凝胶被发明以来,一直以来都被认为是一种超级隔热材料。气凝胶的制作是通过用气体替代凝胶中的液体,同时保持稳定的网络结构。美国国家航空航天局在火星探测器等太空飞行器中成功地采用了气凝胶,这引起了人们对在个人保暖中使用气凝胶的兴趣。然而,由于气凝胶的透湿性较差,它在纺织品领域的应用一直受到限制。
能够粘附在任意和弯曲表面上并能够将机械变形转换为电信号的导电水凝胶在柔性和可穿戴电子和软机器人领域具有高度吸引力。然而,合成水凝胶的力学性能,特别是在重复弹性变形下的抗疲劳性能,远低于天然生物聚合物,这严重限制了它们在涉及重循环载荷的应用中的使用。