中科院理化所刘静团队《Soft Robotics》:液态金属仿生机器水母LM-Jelly来了
2022-05-06
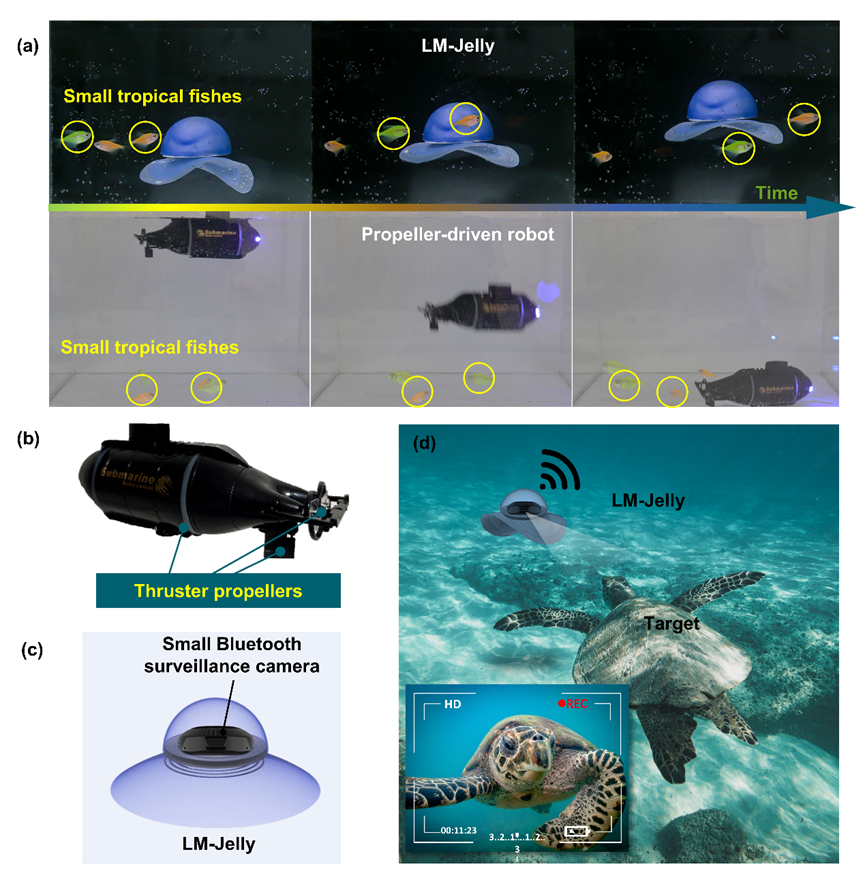
传统基于螺旋桨驱动的水下机器人承担着水下资源探测、环境勘察等任务,但它们通常存在体积大、成本高、噪音大,对水下生物及其生存环境存在惊扰和危害等问题。为与生物实现和谐相处、安全交互,保证自然环境不被破坏,亟需开发各种水下软体机器人,其中最为关键的环节在于实现柔性驱动。液态金属由于具备良好的导电性和流动性,可在任意改变形状的同时保证自身的目标性能,正被快速应用于皮肤电子等对材料顺应性要求比较高的领域。